 RSS订阅
RSS订阅1 引言
近二十年来,GPS(Global Positing System)已经广泛应用于自然灾害的监测,如地震、泥石流以及山体滑坡等[1]。GPS监测结果的准确性,与卫星时钟、地形条件和大气延迟密切相关,它们都是导致GPS连续监测时间序列产生严重的误差的原因[2, 3]。针对这些因素的影响,目前主要采用相对定位和绝对定位的方式获取高精度的点位几何坐标;但是,由于不同时间点的观测值之间缺乏一定的误差相关性,这两种定位方式无法完全消除误差,尤其在长时间GPS监测序列中残留噪声特别显著,严重制约着利用GPS进行灾害监测的可靠性和准确性。
同其它的地球物理现象一样,GPS坐标时间序列中的噪声是被定义为一个幂率的过程来处理的[4]。在消噪过程中,早期的研究只注重GPS连续坐标时间序列中白噪声对监测结果的影响,忽略了闪烁噪声的重要性[5]。现有相关研究成果已经指出GPS坐标时间序列中的噪声,不仅含有白噪声,还含闪烁噪声[6,7]。闪烁噪声具有非平稳变化且长期互相关的特点,相对于白噪声独立且均匀分布的特点来说,它更容易给长时间连续GPS序列分析过程带来更为潜在的影响,这对于许多监测精度要求在毫米级水平的岩土工程(如边坡变形监测和板块运动等)来说是致命的[8,9]。因此,相对与消除GPS坐标时间序列中的白噪声而言,消除闪烁噪声也是非常重要。
长期以来,GPS坐标时间序列的消噪方法一直是GPS应用研究的热点。Donoho 等人在1994年提出了一种小波阈值消噪方法来消除GPS坐标时间序列中存在的白噪声,从而大大的提高了GPS监测的可靠性。这充分的发挥了小波理论在消除GPS连续坐标时间序列中消噪的巨大的潜力,具有重大的意义。基于 Donoho的理论,许多研究人员也提出了一些新的方法来消除GPS所采集的信号的质量。如Gao 1997年运用阈值水平来使得重构后的信号尽可能不含有噪声。Souza 和Monico 通过运用小波收缩的方法来消除GPS坐标时间序列中相应位置的高频信号,从而达到消除噪声的目的。虽然他们在对GPS坐标时间序列消噪方面都做出了巨大的贡献,但是他们几乎都忽略了信号光滑性的重要性。为了弥补这一缺陷,Han等人基于小波软阈值消噪理论提出了一种新的阈值算法来提高信号的光滑性。然而,闪烁噪声具有与白噪声完全不同的统计特性,所以运用处理白噪声的传统方法来消除闪烁噪声已经不再适用了。为了解决这一难题,2003年何凯等人利用香农熵理论将闪烁噪声与白噪声分离,从而达到消除闪烁噪声的目的。除此之外,Wornell 和Oppenheim 在1992年提出了在小波领域内运用极大似然估计来消除闪烁噪声的方法。Chen和 Lin 1994年结合正交小波理论和维纳滤波器对GPS坐标时间序列中的闪烁噪声进行了消除。但是,到目前为止还未见同时有效地消除GPS坐标时间序列中的白噪声和闪烁噪声相关方法。为此,本文针对GPS坐标时间序列中的白噪声和闪烁噪声的特点,提出了一种基于小波系数的混合消噪方法,以期达到提高GPS坐标时间序列分析可靠性目的。
2 基本原理
2.1 技术流程
目前大部分关于GPS坐标时间序列的消噪方法都主要关注于白噪声的消除,很难找到一种方法能够同时消除GPS坐标时间序列中的白噪声和闪烁噪声。本文针对这一方面的问题提出了一种基于小波理论的混合消噪方法来同时消除GPS坐标时间序列中的白噪声和闪烁噪声。图1给出了该方法的基本流程,它主要包括两个部分:(1)基于香农熵理论在白噪声背景下删除闪烁噪声。(2)再运用小波阈值消噪方法消除其中的白噪声。
(图1)
2.2 闪烁噪声消噪方法
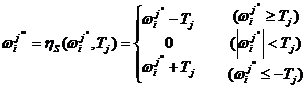
闪烁噪声与其它噪声信号有着截然不同的统计特性。因此,传统的消噪方法已经不再使用于闪烁噪声的消除了。Fu等人在2001年已经指出信息熵可以用来衡量信号的大小[10]。通过这一理论我们就可以估计出在不同尺度下的原始信号与白噪声的小波系数香农熵,进而计算出闪烁噪声的小波系数香农熵的大小。从而将闪烁噪声从原始信号中提取出来。首先,为了得到闪烁噪声与原始信号小波系数香农熵之比,我们需要分别计算出闪烁噪声和原始信号的小波系数香农熵的大小。然后,利用闪烁噪声的小波系数在原始信号中所含信息量的比例,就可以将属于闪烁噪声的小波系数提取出来。最后利用小波重构的方法就可以得到消除闪烁噪声之后的信号。然而,闪烁噪声是无法提前预知的,所以闪烁噪声的小波系数就无法提前计算出来。为了解决这一问题,何凯等人在2003年就已经证明了白噪声的小波系数香农熵只与小波分解尺度和白噪声的方差有关[11],这样我们就可以通过构造出与真实白噪声具有相同方差的人工白噪声来替代真实白噪声计算白噪声的小波系数香农熵,再根据原始信号与白噪声的小波系数香农熵的关系计算出闪烁噪声的小波系数香农熵。下面方程(1)给出的是原始信号、人工白噪声和闪烁噪声的小波系数香农熵之间的函数关系。
 (1)
(1)
其中,原始信号记为![]() ,
,![]() 、
、![]() 和
和![]() 分别代表为原始信号、人工白噪声和闪烁噪声的小波系数香农熵,
分别代表为原始信号、人工白噪声和闪烁噪声的小波系数香农熵,![]() 、
、![]() 和
和![]() 分别代表原始信号、人工白噪声和闪烁噪声的小波系数模极大值,
分别代表原始信号、人工白噪声和闪烁噪声的小波系数模极大值,![]() 代表门限制的大小,它可以通过不同尺度下
代表门限制的大小,它可以通过不同尺度下![]() 与
与![]() 之间的比值变化来确定,当尺度a对应的比值发生急剧增大的情况时
之间的比值变化来确定,当尺度a对应的比值发生急剧增大的情况时![]() 的值就为a。
的值就为a。
然后,通过计算闪烁噪声与原始信号在不同尺度下小波系数香农熵的比例,我们可以计算出在不同尺度上属于不含闪烁噪声的信号的小波系数![]() ,如下所示:
,如下所示:
![]() (2)
(2)
![]() (3)
(3)
其中,![]() 为闪烁噪声在不同尺度下的小波系数,
为闪烁噪声在不同尺度下的小波系数,![]() 代表闪烁噪声与原始信号在不同尺度下小波系数香农熵的比例。
代表闪烁噪声与原始信号在不同尺度下小波系数香农熵的比例。
最后,运用小波重构的方法可以重构小波系数![]() ,从而得到不含闪烁噪声的信号,记为信号
,从而得到不含闪烁噪声的信号,记为信号![]() 。
。
![]() (4)
(4)
2.3 白噪声消噪方法
虽然在上面对原始信号中的闪烁噪声进行了消除,但是信号中还存在着白噪声,这仍然严重的影响着GPS坐标时间序列的准确性。为了能够进一步的提高GPS坐标时间序列的可靠性就必须进一步的消除信号中的白噪声。关于白噪声消除的研究已经很成熟了,本文选择传统的白噪声消噪方法小波阈值消噪方法来对白噪声进行消除。小波阈值消噪法最初是由Donoho 和 Johnstone在1994年提出的用于消除信号中的白噪声。它主要是通过设定阈值来消除属于白噪声的小波系数,然后再将剩余的小波系数进行重构得到消除噪声后的信号。首先我们要运用小波分解将信号![]() 分解成不同尺度下的小波系数
分解成不同尺度下的小波系数![]() ,然后通过软阈值消除白噪声的小波系数,如下所示:
,然后通过软阈值消除白噪声的小波系数,如下所示:
 (5)
(5)
![]() (6)
(6)
其中,![]() 代表给定的阈值。最后在运用公式(4)的小波重构就可以得到最终的消噪结果,记为信号
代表给定的阈值。最后在运用公式(4)的小波重构就可以得到最终的消噪结果,记为信号![]() 。
。
3 案例分析
3.1 原始数据
为了验证本文中所提出的方法的消噪效果,我们选择了一组包含512个数据点的GPS坐标时间序列进行实验。这组数据选择的是我国陕西金堆城钼矿在2012年在该矿区建立了一个GPS连续监测网中的一个监测点(BB05)在2013年7月6日到2013年9月29号期间采集的在竖直方向的连续坐标时间序列。该检测网共包含40个监测点,每个检测点每隔3个小时就会采集一次三维坐标(包括x、y和z方向)。由于系统误差、测量误差和偶然误差的存在,坐标时间序列中存在着许多噪声使得这些监测点所采集的监测点的位移时间序列不能够直接用于边坡的稳定性评价。图2a给出的是监测点BB05在2013年7月6日到2013年9月29号期间所采集的在竖直方向的位移变形数据。显然,它包含着严重的误差以至于监测点的变形趋势无法确定。为了能够更加清楚的看到在效果过程中的信号质量的变化,我们运用傅立叶变换将信号由时间域转换到空间域。经过傅立叶变换之后,有用信号通常集中在低频段而噪声往往集中在高频部分[12]。由图2b可以看出相对于低频部分(<=50 Hz)的振幅,高频部分(>=50 Hz)的振幅非常的明显。这说明了原始信号S1的质量严重受到噪声的影响。
(图2)
3.2 实验结果
图3a给出的是运用本文提出的方法对闪烁噪声的消除结果,记为信号S2。通过图2a和图3a的对比我们可以发现虽然信号S2在光滑性方面较信号S1没有很大的提高,但是从图4b的傅立叶变换结果中可以看出信号S2在高频部分(>=50Hz)的振幅较信号S1有明显的减小。这表明在消除原始信号中的闪烁噪声之后信号的质量有着明显的提高。
GPS坐标时间序列已经被证明了同时含有白噪声和闪烁噪声,虽然消除闪烁噪声之后信号的质量有了明显地提高,但还是远远没有达到边坡监测的要求。为了进一步的提高信号的质量需要进一步的删除信号S2中的白噪声。与闪烁噪声不同,白噪声可以直接通过小波阈值消噪方法进行消除。图3c是运用小波阈值消噪方法从信号S2中消除白噪声之后的结果。信号S3的光滑性较信号S2(图2a)有了明显的提高,可以明显的看出监测点的变形趋势。除此之外,图3d与图2b中的高频部分(>=50Hz)信号S3与信号S2的振幅大小也有着鲜明的对比。这说明了信号S3的质量较信号S2有了很大的提高。同时这一结果也有利的证明了GPS坐标时间序列中的噪声主要是由白噪声和闪烁噪声组成。
(图3)
3.3 分析与讨论
(1)GPS坐标时间序列中噪声的复杂性
许多的传统消噪方法(如小波阈值消噪法、小波收缩去噪法以及卡尔曼滤波法等)在消噪过程中通常将噪声假设为纯白噪声而忽略了闪烁噪声[13-15]。为了更加全面的证明消除闪烁噪声的必要性,我们选择了一个传统的消噪方法的消噪结果进行对比。因为在消除信号S2中的白噪声时我们选用了小波阈值消噪法,为了使对比结果更具说服力,在这一部分我们就选小波阈值消噪法进行消噪。图4a是我们运用小波阈值消噪法消噪后得到的消噪结果信号S4。通过对比图3c和图4a我们可以发现传统消噪方法的消噪结果与本文所提出的消噪方法有着明显的不同。毫无疑问信号S4的光滑信号明显不如信号S3。在图4b中给出的信号S4的傅立叶变化图我们也可以发现在低频部分振幅基本保持不变的情况下,信号S4在高频部分(>=50 Hz)振幅的下降明显不如信号S3。这一结果表明了信号S1中包含着白噪声和其它噪声的组合,而不是仅仅只含有白噪声。在此基础上我们可以得出在消除GPS坐标时间序列中噪声的过程中考虑出噪声外其它类型噪声的存在是非常有必要的。
(图4)
(2)闪烁噪声的验证
图5a给出的是运用香农熵从信号S1中所消除的闪烁噪声的时间序列图。闪烁噪声的功率谱密度与频率的对数已经被证明服从反比的关系[6]。也就是说,当信号的功率谱密度对数(lnS)对应频率对数(lnF)的离散点的回归直线的斜率近似为-1就可以认为该信号是闪烁噪声[1]。图5b给出了用线性回归分析建立的lnS和ln F之间的线性关系来检验文中从信号S1中删除的噪声是否为闪烁噪声。在图5b中可以看出该信号的最小二乘估计的相关系数为0.9534,这表明lnS和ln F之间有着明显的线性关系。因此,我们就可以该线性回归的结果来判断该信号是否为闪烁噪声。因为一元线性回归方程的系数为-1.0597接近于-1,所以可以证明本文中从信号S1中删除的信号为闪烁噪声。
(图5)
(3)信号质量的定量比较
虽然在上述的讨论部分已经对不同信号的光滑性以及高频部分的振幅进行了分析,但是它不能非常直观的表达出不同信号的质量变化。为了能够进一步的了解在消噪过程中不同信号的质量变化,我们将运用不同信号的信噪比再一次进行比较。图6给出的是在消噪过程中出现的4个不同信号的信噪比的比较。从中可以看出信号S3的信噪比高达24.6319,是四个信号中信噪比最好的。这表明了本文中提出的算法所得到的消噪结果要比传统的消噪结果要好。同时我们可以发现信号S2的信噪比等于1.5472,仅仅是原始信号的2倍而已,然而信号S3的信噪比却是信号S2的近16倍。运用传统消噪方法得到的消噪结果信号S4仅仅是原始信号S1的6倍。造成这一现象是由于我们提前在消除白噪声之前提前将原始信号中的白噪声进行了消除,这就使得剩余在信号S2中的白噪声的特性更加的明显从而提高了随后的白噪声消除的效率。此外,在原始信息中的噪声都存在着相互的影响,也就是说一个噪声不仅会对原始信号中有用的信号产生影响,也会对其它类型的噪声产生潜在的影响。这一结果说明了提前对原始信号中的闪烁噪声的消除也有利于白噪声的去除。
(图6)
4 总结
本文针对GPS坐标时间序列中所含的白噪声和闪烁噪声,提出了一种小波混合方法来同时消除GPS连续坐标时间序列中的这两种噪声:
1)证明了GPS连续坐标时间序列的噪声中含有白噪声和闪烁噪声。它们的存在都会对随后的GPS连续坐标时间序列的分析结果产生严重的影响了。
2)证明了我们所提出的小波混合消噪方法能够有效的消除GPS连续坐标时间序列中的白噪声和闪烁噪声,其信噪比和光滑性较传统的消噪方法都有明显的提高。
3)在进行白噪声消噪之前有必要开展闪烁噪声的消除,这有利于提高GPS坐标时间序列的消噪效果。
在当前全球卫星导航定位系统综合运用的前提下,我们不能够完全的排除这些系统所采集的信号存在其它噪声的可能性,如随即漫步噪声。毕竟不同GNSS的综合要比单一的GPS要复杂的多。考虑的各种类型的导航系统在各个行业的广泛应用,通过消除其它类型的噪声来提高坐标时间序列的可靠性变得越来越重要。
参考文献
[1] Montillet JP, Tregoning P, McClusky S, Yu K .Extracting White Noise Statistics in GPS Coordinate Time Series[J]. Geoscience and Remote Sensing Letters,IEEE,2013,10(3):563-56.
[2] Liu J, Chen R, Wang Z, Zhang H. Spherical cap harmonic model for mapping and predicting regional TEC[J]. GPS solutions,2011,15(2):109-119.
[3] Tregoning P, Watson C. Correction to “Atmospheric effects and spurious signals in GPS analyses”[J]. Journal of Geophysical Research:Solid Earth,2011,116(B2): doi:10.1029/2010JB008157.
[4] Mandelbrot BB.The fractal geometry of nature[M]. New York: W.H. Freeman,1983.
[5] 黄立人,符养.GPS连续观测站的噪声分析[J].地震学报,2007,(02):197-202.
[6] Agnew DC.The time-domain behavior of power-law noises[J]. Geophysical research letter,1992,19(4):333-336
[7] Williams SDP, Bock Y, Fang P, Jamason P, Nikolaidis PM, Prawirodirdjo M, Miller M, Johnson DJ. Error analysis of continuous GPS position time series[J]. Journal of Geophysical Research-Solid Earth,2004,109(B3):B03412. doi: 10.1029/2003JB002741
[8] 吴浩,杨剑,黎华.GPS原理及工程安全监测应用[M].武汉:武汉理工大学出版社,2013:57-65.
[9] 吴浩,阮明浩,张宏,等.小样本监测信息露天矿边坡变形预测模型对比分析[J].武汉理工大学学报(交通科学与工程版),2014,(03):544-546.
[10] Fu Z. Information theory-fundamental theory and application[M]. Beijing:Publishing House Of Electronics Industry,2001.
[11] 何凯, 王树勋, 戴逸松. 基于Shannon熵的1/f类分形信号去噪方法[J]. 吉林大学学报(信息科学版), 2003,(01): 21-26.
[12] Zhang Q, Aliaga-Rossel R, Choi P. Denoising of gamma-ray signals by interval-dependent thresholds of wavelet analysis[J]. Measurement Science & Technology,2006,17(4):731-589.
[13] Azzalini A, Farge M, Schneider K. Nonlinear wavelet thresholding: A recursive method to determine the optimal denoising threshold[J]. Applied and Computational Harmonic Analysis,2005,18(2):177-185.
[14] Donoho DL, Johnstone JM. Ideal spatial adaptation by wavelet shrinkage[J]. Biometrika, 1994, 81(3):425-455
[15] Geng Y, Wang J . Adaptive estimation of multiple fading factors in Kalman filter for navigation applications[J]. GPS Solutions,2008,12(4):273-279.
附:图片
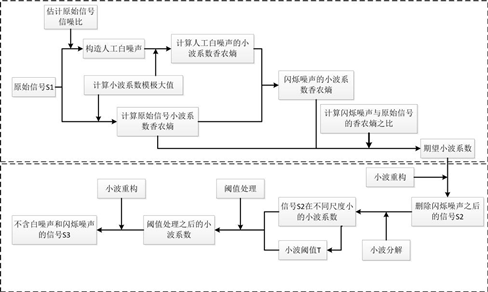
图1: 方法流程图
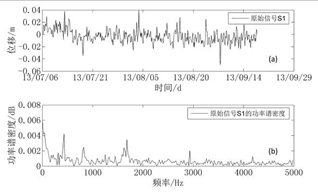
图2:原始信号S1的坐标时间序列和傅立叶变换结果:(a)
信号S1连续坐标时间序列,(b)信号S1的傅立叶变换结果
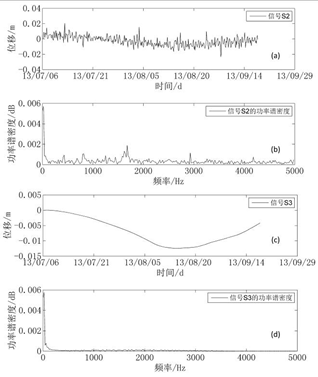
图3信号S2(不含有闪烁噪声)和S3(既不含有白噪声也不含有闪烁噪声)的坐标时间序列和傅立叶变换结果:(a)信号S2的位移时间序列,(b)信号S2的傅立叶变换结果,(c)信号S3的位移时间序列,(d)信号S3的傅立叶变换结果
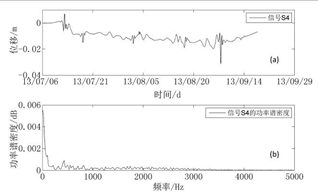
图4:运用小波阈值消噪法得到的信号S4(仅从原始信号中消除白噪声)的坐标时间序列和傅立叶变换结果:(a)信号S4的位移时间序列,(b)信号S4的傅立叶变换结果
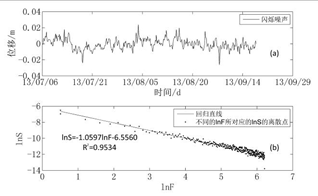
图5:从原始信号S1中消除的闪烁噪声:(a)闪烁噪声的位移时间序列,(b)对应与![]() 和
和![]() 的回归直线和离散点
的回归直线和离散点
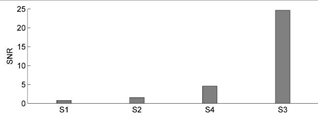
图6:不同信号的信噪比(SNR)的对比结果

