 RSS����
RSS����1����
���������ನ����������ϵͳ���ҹ�ˮ�²������õ����ӡ�Ŀǰ���������λ�����˲�ͬ�ͺŵĵĶನ�������ǡ��Ӽ����ķ�չ�������ನ����������ܾ����˶̶�30��ķ�չ�������о���Ӧ���Ѵﵽ�˽ϸߵ�ˮƽ���ر��ǽ�ʮ���꣬�ڸ����ܼ�������߷ֱ�����ʾ���߾��ȶ�λ�������ֻ��������Լ�������ظ��¼����Ľ����֧���£��ನ������ϵͳ����˼���ط�չ���ನ��������һ�־��и�Ч�ʡ��߾��Ⱥ߷ֱ��ʵ�ˮ�µ��β����¼������봫ͳ����������ϵͳ��Ƚϣ��ನ������ϵͳ���в�����Χ���ٶȿ졢���ȸߵ��ŵ㡣���Ѳ������ԭ�ȵĵ���״��չ����״������һ����չ�������ͼ���Ӷ�ʹˮ�µ��β���������չ��һ���ϸߵ�ˮƽ���ನ�������ܹ���ˮ�µ��н���ȫ���Dz���������ͬ�������ࡢ������ݡ�ȫ���ǵ��ص㣬����ɳ��淽������ɵIJ����������������ڴ�����ߵIJ�������Ҫ���ˮ�����β����ȡ����ڶನ������ʵʱ��ع��ܣ������ֳ�����ˮ�µ����ò��ϸ�仯������ڵ̷���ȫ�����ڡ�������⡢ˮ�¹���ʩ����⡢�ۿڼ��迣���̼�⡢ˮ��������̽�����̵ȷ��������������������������á�
Ŀǰ��ˮ�IJ���ϵͳ�IJ������Ҫ�ǵ�������������ನ������ϵͳ��ȫ����Χ��Ӧ�ý��٣�����ѡ���SONIC2024�ನ������ϵͳ��������ӥHY1601����������ϵͳ�ڵ��͵�ˮ�µ�������--���������������Ӷ��е�Ӧ�ý��жԱȷ�����
2 ˮ�����ϵͳ
2.1 SONIC2024�ನ������ϵͳ
SONIC2024�ನ������ϵͳ��һ�ֶഫ�����ĸ�����ϲ���ϵͳ����Ҫ�ɻ�������CARIS���ݴ���ϵͳ��PDS2000���ɴ�����GNSS���Ƕ�λϵͳ���˶������������������ǵȹ��ɡ�SONIC2024�ನ������������������256��������˺ͽ��ն˳ʡ�T�����Σ�����Ƶ��Ϊ200��400KHZƵ����ʵʱ��ѡ���Ҳ��������Ϊ10�b��160�b��������ʵʱ�ɵ��������������̿ɴ�500�ף������Ϊ1.25cm���������ʿɴ�75HZ[1]�����ȷ��Ϲ��ʺ���������֯(IHO)S-44���ȱ���
���ڶನ��ϵͳ��һ�ഫ����ϵͳ������������ʱ��ͬ���ԡ��������İ�װλ�á��Ƕȵȸ���ƫ��Բ����ɹ����Ⱦ�����Ӱ�졣��ˣ��ڽ��жನ������ǰ����Ҫ����Щƫ�����У��У�ķ����Dzɼ�һϵ���ض����ߵ����ݣ�ͨ��PDS2000У�����ܽ��м��㣬�õ��ನ������������ҡ��Pitch������ҡ��Roll������ҡ��Yaw���Ȱ�װƫ���������Ҫ���УҪ��������1��
��1 У�ķ�����Ҫ��
|
��� |
��Ŀ |
����Ҫ�� |
УҪ�� |
����Ҫ�� |
|
1 |
��ƫ |
ƽ̹���� |
ͬ1�����ߡ��������2�� |
2��ͬ�١����������ٶ� |
|
2 |
��ƫ |
б�»�Ŀ���� |
ͬ1�����ߡ��������2�� |
2��ͬ�١����������ٶ� |
|
3 |
��ƫ |
б�»�Ŀ���� |
2���ߡ�10%-50%���ǣ�ͬ����2�� |
2��ͬ�١����������ٶ� |
Sonic2024���������ִ������İ�װ�����Ƚ�С��У����Ƚ�ȷ��У�������2��
��2 Sonic 2024�Ϳ����ನ��������У������/(�b)
|
ϵͳ���� |
GNSS��ʱ |
��ҡ��Roll�� |
��ҡ��Pitch�� |
��ҡ��Yaw�� |
|
Sonic2024ϵͳ |
ͬ �� |
1.970 |
-1.090 |
5.560 |
����������°�װ��Ӧ���½���У������ȡ�µ�У��������
2.2 HY1601˫Ƶ����ϵͳ
HY1601��������һ��������ֲ���ϵͳ���ڼ���������������źŴ���������ͼ�γ�������һ�壬����һ�廯Ƕ��ʽϵͳ�ṹ������Ƕ��ʽ����ϵͳ��ʵ���˲�����������ƽ̨��������ϣ��߶������˲����Dz�������Ƶ��������ܻ���HY1601�����ǵĹ���Ƶ��Ϊ208kHz��HY1601�����ǻ�����ϵͳ���Ϊ�������������������������������������������DFNow.exe-����������DFPlayBack.exe-�ط��������������ֲ���ϵͳ��һ�廯���ü����ϵͳ�ı�Яʽ����ģʽ��������ü������Դ��ʵ��ȫ�����ֻ�����Ӧ�ã���Ŀǰ������Ϊ�Ƚ��Ϳɿ���ȫ���ֲ���ϵͳ�������ڽ��ӡ��ۺ��ͺ������ȸ��ָ���ˮ���µ�ˮ���������[2]��
3ˮ������ѡȡ��Ȳ�
������Ҫ��ˮ�¹��̰����Ӷ����Ρ����ٱ仯��ˮ����ʯ��ˮ��DZ�ӵȣ����д�ˮ�¹��̣��������������š�����Ŀ�ĺ��������ˮ�ĵ�������������ͬ������Ŀ�ĵļ���Ҫ��Ҳ����ͬ������Խ�߹۲��Ѷ�Խ����Ը�����Ŀ���ص���ѵ㣬�ڹ۲���ѡȡ�����Ƚ���ˮ�²���������ʵʱ��Ч���ṩˮ�µ��ε���ʵ�����������ʵ��֤���̽��������������߹��̼���ˮƽ��
����ѡȡ���д����Ե�������������̲�Ӷν��бȽ��о����úӶ�ˮ�µ��θ��ӣ���ȱ仯Ƶ�����Ӵ����ٽ��棬��ɳ�˶�ʮ�ָ��ӡ������ܵ��ʹ������õ�Ӱ�죬�Ӷ���ƽ���ϳ����������ĺӵ���̬������Ȼ����£��Ӷ��ڿ�խ��䣬̲�����棬����Ͽ�Ⱥӵ����Ӵ�������һ��Ϊ���ҡ���ʯ����ʯ��ɳ��ɡ�����˸��ӵĻ����½��жನ���뵥���������Ӧ�öԱȾ��ȷ����������dz����д����ԡ�
3.1�ನ���뵥���������
Ϊ��Ѱ��һ�ָ���ȷ����ȫ�淴ӳˮ�µ�����״���ֶΣ�����SONIC2024�ನ������ϵͳ��������ӥHY1601����������ϵͳ����������������̲�Ӷν��бȲ⡣SONIC2024�ನ������ϵͳʵʱ��������̬����������ʱ��ͬ����HY1601����������ϵͳֻ���������ٸ���������Ȳⷽ�����£�
��1�� ϵͳ�Է��ԱȲ⣺ͨ����Ծ��������ķ������ڲ�ͬ�ĵ�����������������ص��IJ��ߣ��ֱ��ȡ�����ص����ˮ�����ݽ�����������
��2�� ϵͳ��Ȳ⣺���öನ���͵�����ϵͳ��ͬһ����ֱ��ȡˮ�����ݣ���ͬһ����λ�ý���ˮ��ȽϷ������ó���صľ���ͳ�ơ����������ɵĵ���ͼ����ͼ�αȽϺ�����Աȣ��ó����ۡ�
3.2ϵͳ�Է��ԱȲ�
3.2.1 ƽ̹����
ѡȡ�úӶν�ƽ̹����ˮ�¸߳���0��40��Χ�ڣ�ˮ����20m���ң�ͬһ��������������4�Σ�ѡȡ160�������ͳ�Ʒ������������3��
��3 ��ƽ̹��������ϵͳ�Է��Ծ��ȱȽϷ���ͳ�Ʊ�
|
ͳ��������� |
ˮ��������ͳ�� | ||
|
�ġ�0.5% |
0.5%���ġ�1.0% |
1.0% ���� | |
|
�ನ������ϵͳ |
96.7 |
3.3 |
0 |
|
���������� |
90.7 |
5.6 |
3.7 |
3
.2.2 ��������
��������������������Ȼ�ӶΣ��ܶ�ط���������ϴ�ˮ��仯Ƶ����Ϊ�ˣ��ص��ڸúӶ�ѡȡ��������ˮ����8��30m��ͬһ��������������4�Σ�����������ͳ�Ʒ������������4��
��4 ������������ϵͳ�Է��Ծ��ȱȽϷ���ͳ�Ʊ�
|
ͳ��������� |
ˮ��������ͳ�� | ||
|
�ġ�0.5% |
0.5%���ġ�1.0% |
1.0% ���� | |
|
�ನ������ϵͳ |
94.8 |
3.8 |
1.4 |
|
���������� |
81.8 |
14.6 |
3.6 |
ͨ����3����4�����Կ����ನ������ϵͳ���Է��������������������С��0.5%�ı��������94%���ϣ�������������ϵͳ�ڶ��������������С��0.5%�ı�����82%���¡��ɴ˿ɼ����ನ������ϵͳ���Է������ڵ���������ϵͳ���ر�����ˮ�µ�������ϴ���������Ƹ������ԡ�
����������ϵͳ��ˮ�µ�������ϴ�������Է��Խϲ�Ŀ���ԭ���У��ٵ���������ϵͳ�ڽ��в���ʱû�н�����̬�������ڲ���ʱ��������ˮ��ҡ�Σ���ʱ�����ˮ��ǻ�������ֱ���µ���ȣ�������б�ij��ȡ��ڵ�������ϴ�������������ƫ��ڵ���������ϵͳ�������IJ����Ǵ��ڶನ������ϵͳ�IJ����ǣ���ˮ�IJ�������ӡ���ϴ�1.5�b�����ڴ�ֱ�·��ġ���ӡ��Ϊ0.5���ڽϴ�Ľ�ӡ�У�ֻ��ȡһ�������ֵ����Ӵ������
3.2.3 �ڷ��Ͼ���ͳ��
�ڴ�̲�����Ӷ�������У��Ķನ�����ݽ����ڷ��Ͼ���ͳ�ƣ���Թ�����22���ߣ�����8������ߣ�14�����ߣ������е����꣺��32***15��36**28������������ˮ����5��35m����������ͳ�Ʒ��������ڷ��Ͼ��ȷ���Ҫ����ͳ�Ƽ��㹲63678�㣬98.65%����IHO�ؼ�����������99.61%����IHOһ����������, 99.88%����IHO��������������ͳ�Ʊ�����5��(�������ڷ��Ͼ����ڴ˲���ͳ��)
��5 Sonic 2024�Ϳ����ನ�����������ͳ�Ʊ����ڷ��ϣ�
|
Beam Number |
Count |
Max (+) |
Min (-) |
Mean |
Std Dev |
Special Order (%) |
Order 1 (%) |
Order 2 (%) |
|
������� |
���� |
������ |
����� |
��ֵ��� |
�� ��� |
�����ؼ� ���ٷ��� |
����һ�� ���ٷ��� |
���϶��� ���ٷ��� |
|
1 |
293 |
1.295 |
1.588 |
0.010 |
0.353 |
96.9 |
99.7 |
100 |
|
2 |
361 |
3.357 |
0.844 |
0.242 |
0.336 |
97.0 |
99.4 |
99.7 |
|
3 |
454 |
1.491 |
2.779 |
0.243 |
0.350 |
95.2 |
99.3 |
100 |
|
4 |
513 |
3.163 |
3.696 |
0.222 |
0.404 |
94.2 |
99.2 |
99.6 |
|
5 |
533 |
2.288 |
3.323 |
0.226 |
0.395 |
94.4 |
98.7 |
99.8 |
|
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� |
|
251 |
331 |
2.447 |
5.239 |
0.249 |
0.552 |
90.3 |
97.9 |
98.8 |
|
252 |
279 |
3.161 |
2.451 |
0.337 |
0.508 |
87.1 |
95.7 |
99.3 |
|
253 |
228 |
2.700 |
3.727 |
0.272 |
0.538 |
91.2 |
96.5 |
98.7 |
|
254 |
225 |
3.571 |
1.011 |
0.329 |
0.506 |
87.1 |
97.8 |
98.7 |
|
255 |
201 |
3.330 |
4.359 |
0.313 |
0.616 |
86.1 |
97.0 |
98.5 |
3.3 ϵͳ��Ȳ�
Ϊ����ನ������ϵͳ�����ܣ�ʹ�öನ������ϵͳ�봫ͳ���������ǽ����о��������봫ͳ�ĵ��������������ƣ������ನ������ȵ�һ����Ч�����Dz������������ཻ�ļ����ߣ������ַ������������ನ�������Լ�����������װ��У��ˮλ���������ٸ����ȶԲ���������ۺ�Ӱ�졣
3.3.1 ����ȶԱ�
��������������̲�ӶΣ���ˮ��3m����������жನ��ȫ���Dz�������������1:1000�����߽���ȫ�Ӷβ��������жನ������ϵͳ�������ݴ������ȡ�뵥���������ԭʼ��������ӽ���X��Y������0.4m����200�����ˮ����бȽϣ����ճɹ������ڹ淶�����ķ�Χ�ڣ�����������ͳ�ơ����ֲ�����Ȳ�����ϵͳ�����������ֵͳ�Ƽ���6��
��6 ����ϵͳ�Ȳ�����������ͳ�Ʊ�
|
��� |
|
�ನ������ϵͳ |
���������� |
|
����� ��/% | ||||
|
|
X |
Y |
ˮ��/m |
X |
Y |
ˮ��/m | |||
|
1 |
32***80.59 |
36**74.94 |
13.42 |
32***80.48 |
36**74.83 |
13.40 |
0.1 | ||
|
2 |
32***38.65 |
36**63.89 |
10.29 |
32***38.41 |
36**63.70 |
10.20 |
0.9 | ||
|
3 |
32***42.27 |
36**69.16 |
17.31 |
32***42.27 |
36**69.02 |
17.35 |
0.2 | ||
|
4 |
32***66.41 |
36**09.31 |
20.48 |
32***66.31 |
36**09.26 |
20.40 |
0.4 | ||
|
5 |
32***79.04 |
36**91.79 |
19.77 |
32***79.09 |
36**91.60 |
19.87 |
0.5 | ||
|
6 |
32***51.52 |
36**63.65 |
24.84 |
32***51.46 |
36**63.51 |
24.89 |
0.2 | ||
|
�� |
�� |
�� |
�� |
�� |
�� |
�� |
�� | ||
|
198 |
32***41.38 |
36**88.51 |
33.51 |
32***41.25 |
36**88.64 |
33.46 |
0.1 | ||
|
199 |
32***05.25 |
36**61.29 |
27.41 |
32***05.38 |
36**61.50 |
27.29 |
0.4 | ||
|
200 |
32***14.65 |
36**44.50 |
9.87 |
32***14.76 |
36**44.71 |
9.80 |
0.3 | ||
3.3.2 ���ֵ���ͼ�Ա�
��1������ͼ�Ա�
����ڵ����������ǣ��ನ���������ݵ��ܣ��ܹ�����ȷ�ز��ˮ��Ŀ����Ĵ�С����״�ߵͱ仯�����Ƶĵ����߸���ϸ��Ҳ����ʵ�ط�ӳ���ε�ò��������ͼ1��ʾ��
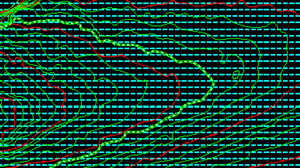
ͼ1 ��Ϊ�ನ�����ݵ���ͼ����Ϊ���������ݵ���ͼ
��2�����Ա�
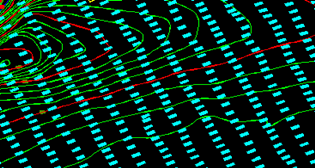
R2 Sonic 2024�ನ������ϵͳ�����ڲ��������и���ʵ�ʻ�������ϵͳƵ�ʺ�����ǣ���ˮ�����50 m��ˮ���У��ܱ�֤����Ϊ1 m���С������ͳ�����Dz����ǹ̶��ұȽϴ���ֻ����ǿ�ﵽ5 m����ͼ2��ʾ��
ͼ2 ��ɫΪ�ನ�����ݣ���ɫΪ����������
3.2.3 ����Ա�
���ݴ˴��ڴ�̲�����ıȲ����ݣ����õ��������������ݻ�����5 m���ĵ���ͼ���öನ�����ݰ���ͬ��������1��4m�ĵ���ͼ���ֱ���DTMģ�ͣ����㲻ͬ��������Χ������������������ͳ�����ǺͶನ������ϵͳ�ڲ�ͬ��������������ֵ����ನ������ϵͳ��������İٷֱȣ����������7��ʾ���ɱ��ɼ����Ÿ�ϸ���ĵ��Σ�������Խ�����Ľӽ� 36%��˵���ನ���ܸ�ȫ��ط�ӳÿ�����ε�ϸ�������
��7 ����ϵͳ�����ͳ��
|
�̣߳�m�� |
|
�ನ����������1m��������� |
�����������ǣ������5m��������� |
|
��ֵͳ��% |
|
-17 |
|
17540 |
17485 |
|
0.3 |
|
-18 |
|
9766 |
9717 |
|
0.5 |
|
-19 |
|
5335 |
5285 |
|
0.9 |
|
-20 |
|
2211 |
2129 |
|
3.7 |
|
-21 |
|
716 |
656 |
|
8.4 |
|
-22 |
|
113 |
72 |
|
36.3 |
4�ನ������ϵͳ�����������Ӧ��
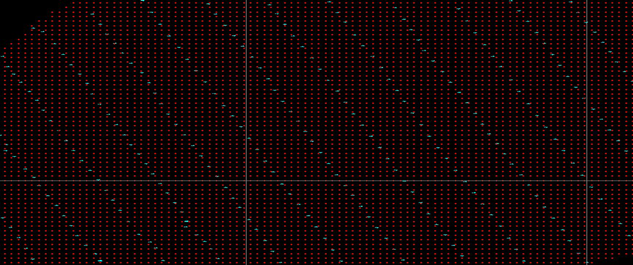
�ನ�����е����켣�洢�ͻطŹ��ܣ��ɶ�ͬһˮ����ж�����ղ��������ṩ�߷ֱ��ʵ�ˮ�µ���ͼ�������ͼ������ͼ����άͼ���ܹ���ӳϸ�ڵı仯���������ӵ��仯���ݱ���о���ͼ3��ij�ӵ��ı仯���ƣ�ͼ�������� 2011���ˮ�ڵĵ����ߣ�ʵ���� 2013 ���ˮ�ڵĵ����ߣ��ɼ���ԭ�� -18 m �ĵ��������Ѿ������� -21 m���Ұ������������ײ������ٻ���

ͼ3 **�ӵ��仯����ͼ
5 ����
ͨ����������������̲�Ӷβ�ͬ��������ıȲ���������Եó����½���
��1��ͨ���뵥�����������ݶԱȷ������ನ������ϵͳ��ϵͳ�����ǿɿ��ġ��뵥��������������ȣ��ನ���������ݵ��ܣ��ܹ�����ȷ�ز��ˮ��Ŀ����Ĵ�С����״�ߵͱ仯�����Ƶĵ����߸���ϸ��Ҳ�ܸ���ʵ�ط�ӳ���ε�ò��������ˮ������Ѱ��Ҳ���ܷ������������ŵ㡣
��2���ನ��ϵͳ������������������������ҵ��������Ҳ��Ϊ���ӣ��˹���Ԥ��Դ��������ȷ�������ϴ�Ӱ�졣��ˮ���ļ���dz̲����Ҳ�����в������ڶԴ�̲�Ӷ�ƽ̹������бȲ�ʱ��Ҳֻ�ܶ���ˮ����������в������Դ�dz̲������������ʩ�⡣��֤��������ϵͳ����ˮ��>3m������Ĵ�����ߡ�С��Χ�IJ�ͼ���Ŵ�ͳ����ϵͳ��������ŵ㣻�������˽���dz̲������С�����ߡ���Χ�����������
��3�����ڶನ������ϵͳ��Ϊ���أ���װ��Ϊ���ӣ���ҵ����Ҳ��Ϊ�������뵥��������ϵͳ��ȣ��ನ������ϵͳ��ҪͶ����������������������ҵ��������ҵ��������Ҫ���Ѹ����ʱ���뾫����
��4���봫ͳ�ĵ���������ϵͳ��ȣ��ನ������ϵͳ�������и����Ժ������ԡ��ںӣ����������ء���Ϊ������������ϵͳ�������ò��������ನ������������������ı��������������豸���������š���Χ������ˮ����Ŷ���ˮ���ʶ�������Ӱ��ȵȣ����ͬ�̶ȵظ��ನ��ϵͳ��������������������һ���ĸ�����Ӱ��[3]����ˣ��ڶನ��ϵͳ��ҵ�ĸ����Σ������������ϸ�µIJ��á���ʵ��Ч���������ơ���ѧ��ȷ�ľ���������������Ч����߶ನ������ɹ���������ַ��Ӷನ������ϵͳ����Խ�ԡ�
��5���ڲ��������ϴ����У��漰�IJ����϶࣬�ҶԲ����������ȷ���Ӱ��ܴ�����ҡ����ҡ�Ͷ�̬��ˮ�Բ�����ۺ�Ӱ���У���̬��ˮ��Ӱ����Ϊֱ�ӣ�����ռ�нϴ�ı��أ�����ʵ�������У���Ӱ�����������ӣ�Ӧ��ǿ�ⶨ���˵���ʶ��
�����
[1] �Խ�����������.�ನ������ϵͳ����״�ͷ�չ���ơ�[J].�����档2008��(5):7-8.
[2]��ӥ�ӿƺ���������˾��HY1601ʹ��˵����[M].
[3] ��ɸգ���ΰΰ���ܾ���.��ͳ�ನ��ϵͳ���������ص�Ķನ��ϵͳ���о�[J].�����棬2007.27(2):70-80.

