
北斗系统的RAIM算法研究
The research on BDS Abstract: The BeiDou System (BDS) has covered under the background of the Asia Pacific, and has been widely applied in the field of navigation and positioning, but for completeness of BeiDou System study is relativel...
- 作者:王达,秘金钟来源:2014测绘学会|2014年12月26日
The research on BDS
Abstract: The BeiDou System (BDS) has covered under the background of the Asia Pacific, and has been widely applied in the field of navigation and positioning, but for completeness of BeiDou System study is relatively lag, this paper will be based on relevant distance RAIM algorithm of QR parity check method is applied to the BeiDou System, analysis of the completeness of BeiDou System, satellite availability, identify weed out contains gross error of the satellite data, in order to improve the positioning accuracy, at the same time analysis the characteristics of the completeness of BeiDou
System.
Key words:Geodesy;BDS; RAIM; Relevant Distance; Completeness
WANG Da, Bei Jin-zhong (1 Institution of Geological Surveying and Mapping of Hebei Province, Langfang,Hebei, 065000, China ;2 Chinese Academy of Surveying and Mapping, Beijing 100039, China)
0 研究背景
北斗卫星导航系统是中国自行研制的全球卫星定位通信系统(BDS),现阶段已经发射了16颗卫星,随着2012年12月27日北斗系统ICD公布,北斗系统开始向中国及周边地区提供连续的导航定位和授时服务,这也标志着北斗系统覆盖亚太的目标实现。随着北斗系统在各个行业中的应用,在应用中反映出来的问题也逐渐增多,其中,北斗系统的完备性问题就是比较重要的一个。本文采用河北省北斗CORS网的实测数据,对基于相关距离思想的QR奇偶检校法的RAIM算法进行了研究,并将其应用于北斗系统的数据处理,来探求北斗系统定位过程中用户自主式完备性监测情况。
1 基本原理
用户自主式完备性监测一般称为RAIM,是Receive Autonomous Integrity Monitoring的缩写,是指根据用户接收机的多余观测值监测用户定位结果的完备性。目前由于基于伪距的算法具有较好的实时性而得到广泛的应用,基于向量相关距离的QR奇偶检效法是由秘金钟研究员在2010年提出的一种基于伪距观测量的算法,是一种较为新颖的算法,该算法可以快速的识别并剔除粗差观测值,从而提高卫星定位精度。
1.1 向量相似度指标
在进行聚类分析时,首先要有一个能够衡量样品或指标间亲疏关系或相似程度的统计量,常用的主要有两种:相似系数和距离。前者主要用于描述指标间的关系,后者多用于样品的分类。[1]
相似系数种类很多,其中较为常用的有:
相关系数
 (1.1)
(1.1)
将样品看做m维空间的点,用点间的距离来表示样品之间的亲疏关系。距离越小,表明样品之间的关系越密切;反之,距离越大,相似程度越差。因此,距离较小的样品应归为一类,距离较大的样品应属于不同的类。常用的距离有:Minkowiki距离、Mahalanobis距离、Lanee距离。其中Minkowiki距离表达式为:
 (1.2)
(1.2)
当q取1时称为绝对值距离;当q取2时称为欧氏距离;当q趋于无穷时称为Chebyshev距离。
在Minkowiki距离中,欧氏距离
![]() (1.3)
(1.3)
在实际中用的很多,但是存在一些缺点,如它与指标的量纲、指标的个数等有关,并且没有考虑指标之间的相关性。为了消除指标量纲不同的影响,事先必须对数据进行处理;为了扣除指标个数的影响,可以对公式进行如下处理:
![]() (1.4)
(1.4)
1.2 QR奇偶检效法的基本原理与性质
在最小二乘方法中,由定位误差方程:[2]
![]() P(权)(1.5)
P(权)(1.5)
可得到用户定位位置参数方程:
![]() (1.6)
(1.6)
此时可对上式中的l向量做一种线性变换。
 (1.7)
(1.7)
则可得QR奇偶检效法向量定义式:t=Tl。QR奇偶检效法向量xx的性质:
![]() (1.8)
(1.8)
![]() (1.9)
(1.9)
QR奇偶检效法向量转换矩阵T是一特殊转换,它把n维观测空间转化为(n一4)维的Parity空间。T有以下特殊性质:(l)T的行与B的列正交;(2)T的行相互正交;(3)T的行都进行了标准化,每一行的大小都是单位1。
在QR奇偶检校法方法中,经证明可得到结论:![]() 。
。
2 QR奇偶检效法的向量分析与出差识别
由QR奇偶检效法向量定义式t=Tl,并把l用它的等量![]() 来代替,由于正交性质TB=0,且不妨令
来代替,由于正交性质TB=0,且不妨令![]()
![]() 则有:[3]
则有:[3]
![]() (2.1)
(2.1)
其中t为QR奇偶检校法向量,T为QR奇偶检校法产生矩阵,![]()
![]() 为负残差。
为负残差。
由上式可以得其矩阵展开式:
 (2.2)
(2.2)
其中m=n-4,n为卫星数;![]()
![]() 是观测值i的负残差,是数值变量。
是观测值i的负残差,是数值变量。
设:![]()
![]() 则有:
则有:
![]() (2.3)
(2.3)
QR奇偶检校法向量t,由卫星位置的几何图形矩阵![]()
![]() 和观测量的函数特性
和观测量的函数特性![]()
![]() 所决定。当某观测量出现粗差时,都将表现为该观测量的
所决定。当某观测量出现粗差时,都将表现为该观测量的![]()
![]() 值较大,即向量
值较大,即向量![]()
![]() 的模较大。所以,QR奇偶检校法向量t与误差观测量的影响向量
的模较大。所以,QR奇偶检校法向量t与误差观测量的影响向量![]()
![]() 具有相当强的相关性。[4]
具有相当强的相关性。[4]
通过前面的叙述我们知道向量的相关性有两种表现方式,第一种是相关系数,第二种是相关距离。
将式(2.3)中等号左右部分合并处理,得到全设计矩阵:
 (2.4)
(2.4)
利用该全设计矩阵计算各个向量a间的相关系数和相关距离。
相关系数可以由下面公式计算,该公式反应出各列向量![]()
![]() 之间的相关关系:
之间的相关关系:
 (2.5)
(2.5)
![]()
![]() 反映了
反映了![]()
![]() 与
与![]()
![]() 的相关程度,特别的是
的相关程度,特别的是![]()
![]() 反映任意列向量
反映任意列向量![]()
![]() 与最后一列
与最后一列![]()
![]() 的相关关系,当
的相关关系,当![]()
![]() 中含有一个粗差时,
中含有一个粗差时,![]()
![]() 越接近于1,相关性越强,说明QR奇偶检校法向量t受到的影响越大,则其出现粗差的可能性就越大;而
越接近于1,相关性越强,说明QR奇偶检校法向量t受到的影响越大,则其出现粗差的可能性就越大;而![]()
![]() 越接近于0,
越接近于0,![]()
![]() 对QR奇偶检效法向量t的影响小,则其出现粗差的可能性就越小。当
对QR奇偶检效法向量t的影响小,则其出现粗差的可能性就越小。当![]()
![]() 中含有多个粗差时,QR奇偶检效法向量t的变化规律,将表现为来自这些粗差对其影响的叠加,这可能使某个并不含有粗差的
中含有多个粗差时,QR奇偶检效法向量t的变化规律,将表现为来自这些粗差对其影响的叠加,这可能使某个并不含有粗差的![]()
![]() 的相关距离出现误判。
的相关距离出现误判。
但在试验过程中发现,由于![]()
![]() 向量之间存在相关性,如果仅分析
向量之间存在相关性,如果仅分析![]()
![]() ,可能无法识别各个粗差。
,可能无法识别各个粗差。
相关距离可以由下面公式计算:
![]() (2.6)
(2.6)
称![]()
![]() 为
为![]()
![]() 与
与![]()
![]() 的相关距离,反映了各个向量之间的相关程度。当
的相关距离,反映了各个向量之间的相关程度。当![]()
![]() 中含有一个粗差时,则该列向量
中含有一个粗差时,则该列向量![]()
![]() 与最后一列向量
与最后一列向量![]()
![]() 的相关距离
的相关距离![]()
![]() 会明显变小,说明相关性越强,,说明最后一列
会明显变小,说明相关性越强,,说明最后一列![]()
![]() 受到
受到![]()
![]() 的影响越大,则其出现粗差的可能性就越大;而其他列向量
的影响越大,则其出现粗差的可能性就越大;而其他列向量![]()
![]() 与最后一列
与最后一列![]()
![]() 的相关距离
的相关距离![]()
![]() 会变大,且具有同向性。当
会变大,且具有同向性。当![]()
![]() 中含有多个粗差时,相关距离的变化规律,将表现为来自这些粗差对其影响的叠加,这可能使某个并不含有粗差的
中含有多个粗差时,相关距离的变化规律,将表现为来自这些粗差对其影响的叠加,这可能使某个并不含有粗差的![]()
![]() 的相关距离出现误判。[5]
的相关距离出现误判。[5]
基于相关距离的QR奇偶检校法RAIM算法的具体步骤如下:
<!--[if !supportLists]-->1) <!--[endif]-->对观测值进行最小二乘平差。
<!--[if !supportLists]-->2) <!--[endif]-->求QR奇偶检效法产生矩阵T、QR奇偶检效法向量t,以及![]()
![]() 。
。
<!--[if !supportLists]-->3) <!--[endif]-->对![]()
![]() 进行了检验,若检验不通过,则含有粗差;
进行了检验,若检验不通过,则含有粗差;
<!--[if !supportLists]-->4) <!--[endif]-->确定含有粗差后,计算QR奇偶检效法产生矩阵T各个列向量![]()
![]() 与QR奇偶检效法向量t的相关系数
与QR奇偶检效法向量t的相关系数![]()
![]() 以及相关距离
以及相关距离![]()
![]() 。
。
<!--[if !supportLists]-->5) <!--[endif]-->应用最小距离法,对相关系数和相关距离进行考察,确定和识别粗差。
<!--[if !supportLists]-->6) <!--[endif]-->为了避免“存伪”的情况,将各观测值逐一恢复到原平差系统中,重新平差并检验,若满足粗差条件,则确认为粗差;否则为误判,应予以恢复;将最终确定为粗差的观测值剔除后完成最后的平差。
需要说明的是,由于各向量具有相关特性,相关系数法有时候会出现无法区分粗差即无法识别粗差的情况。
3 QR奇偶检校法数据处理与分析
利用河北BDS/GPS CORS提供的数据,在定位过程中形成基本观测方程,利用QR奇偶检校法产生矩阵T,以下例子就是BDS单个历元计算时随机选取的,从QR分解后得到的矩阵T以及矩阵ε开始进行,采用相关距离思想,以两个向量相似度为指标经过计算找出粗差项并予以剔除。
从全相关系数矩阵中最后一列可以看出第8个观测量为0.747较为接近1因此有可能含有粗差,而从其内部观察,![]()
![]() 、
、![]()
![]() 和
和![]()
![]() 的值比较接近1,说明第2列与第3列、第5列相关性较强,第4列与第7列相关性较强,结合实际情况,第2、3、5列代表的卫星分别是5、1、4号卫星,均为GEO卫星,因此表现出较强的相关性;而第4、7列代表的卫星是10和7号卫星,二者都是IGSO卫星,因此表现出较强的相关性。
的值比较接近1,说明第2列与第3列、第5列相关性较强,第4列与第7列相关性较强,结合实际情况,第2、3、5列代表的卫星分别是5、1、4号卫星,均为GEO卫星,因此表现出较强的相关性;而第4、7列代表的卫星是10和7号卫星,二者都是IGSO卫星,因此表现出较强的相关性。
表1 全相关系数矩阵![]()
![]()
|
1.000 |
-0.107 |
-0.022 |
0.114 |
-0.291 |
0.362 |
-0.356 |
0.384 |
-0.283 |
0.570 |
|
-0.107 |
1.000 |
-0.935 |
0.128 |
-0.786 |
-0.033 |
0.279 |
-0.299 |
0.147 |
-0.494 |
|
-0.022 |
-0.935 |
1.000 |
-0.277 |
0.632 |
-0.195 |
-0.318 |
0.459 |
0.051 |
0.458 |
|
0.114 |
0.128 |
-0.277 |
1.000 |
0.147 |
0.076 |
0.859 |
0.217 |
-0.204 |
0.277 |
|
-0.291 |
-0.786 |
0.632 |
0.147 |
1.000 |
0.220 |
0.162 |
-0.115 |
-0.094 |
0.241 |
|
0.362 |
-0.033 |
-0.195 |
0.076 |
0.220 |
1.000 |
-0.027 |
-0.258 |
0.241 |
0.411 |
|
-0.356 |
0.279 |
-0.318 |
0.859 |
0.162 |
-0.027 |
1.000 |
0.095 |
0.149 |
0.066 |
|
0.384 |
-0.299 |
0.459 |
0.217 |
-0.115 |
-0.258 |
0.095 |
1.000 |
0.293 |
0.747 |
|
-0.283 |
0.147 |
0.051 |
-0.204 |
-0.094 |
0.241 |
0.149 |
0.293 |
1.000 |
0.328 |
|
0.570 |
-0.494 |
0.458 |
0.277 |
0.241 |
0.411 |
0.066 |
0.747 |
0.328 |
1.000 |
表2 相关距离![]()
![]()
|
0.000 |
3.089 |
3.615 |
3.099 |
3.803 |
2.988 |
3.186 |
3.345 |
3.921 |
5.243 |
|
3.089 |
0.000 |
2.813 |
1.269 |
2.274 |
1.696 |
1.025 |
2.793 |
1.910 |
6.549 |
|
3.615 |
2.813 |
0.000 |
3.031 |
2.463 |
3.325 |
2.879 |
3.558 |
3.136 |
5.101 |
|
3.099 |
1.269 |
3.031 |
0.000 |
1.738 |
1.481 |
0.739 |
2.231 |
2.196 |
6.409 |
|
3.803 |
2.274 |
2.463 |
1.738 |
0.000 |
1.829 |
1.606 |
2.920 |
2.529 |
6.359 |
|
2.988 |
1.696 |
3.325 |
1.481 |
1.829 |
0.000 |
1.233 |
2.688 |
1.959 |
6.444 |
|
3.186 |
1.025 |
2.879 |
0.739 |
1.606 |
1.233 |
0.000 |
2.176 |
1.805 |
6.615 |
|
3.345 |
2.793 |
3.558 |
2.231 |
2.920 |
2.688 |
2.176 |
0.000 |
2.503 |
6.116 |
|
3.921 |
1.910 |
3.136 |
2.196 |
2.529 |
1.959 |
1.805 |
2.503 |
0.000 |
6.234 |
|
5.243 |
6.549 |
5.101 |
6.409 |
6.359 |
6.444 |
6.615 |
6.116 |
6.234 |
0.000 |
从相关距离矩阵的最后一列看,第1个观测值与第3个观测值分别为5.243和5.101与其他具有同向性的距离(6.0左右)不同,因此可能含有粗差。
通过相关系数矩阵和相关距离矩阵分析,可以判断第1、3、8个观测值,即卫星C6、C1和C2可能含有粗差,应该予以剔除。
对于BDS数据,剔除粗差前后计算待定点坐标对比如下图所示。
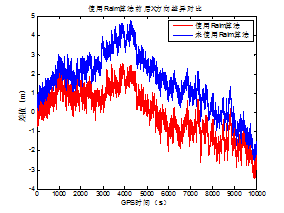
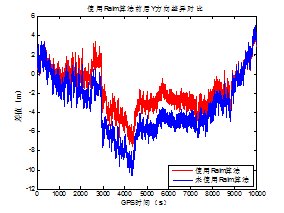
图1 使用Raim算法前后X方向差异对比图 图2 使用Raim算法前后Y方向差异对比图
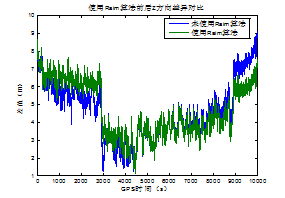
图3 使用Raim算法前后Z方向差异对比图
通过图5.3-5.5可以看出,在X、Y、Z方向上,加入Raim算法剔除粗差后,得到的定位结果基本上都要好于未加入Raim算法的定位结果,而且误差波动的幅度也有所降低,说明加入Raim算法后,使得系统更加稳定了。
4 结束语
本文通过试验,将基于相关距离的QR奇偶检校法的RAIM算法应用于北斗系统中,处理河北省北斗CORS网实时数据,分析了北斗系统的完备性特点,由于组成北斗系统的卫星种类有三种(MGO卫星、GEO卫星、IGSO卫星),每一类卫星的计算方式都不相同,同一类卫星间具有一定的相关性,在采用相关系数分析时要注意避免将其当做粗差提出。[6]经过Raim算法剔除粗差后,定位结果明显优于未处理之前,同时误差的波动也较未处理的误差波动小,说明经过Raim算法处理后,系统定位更加稳定。这为未来北斗系统的稳定性发展提供了一些有益结论。
参考文献
[1]秘金钟.GNSS完备性监测方法、技术与应用[D].湖北武汉:武汉大学,2010.
[2]李征航,黄劲松.GPS测量与数据处理[M].湖北武汉.武汉大学出版社,2005:108-202.
[3]P.B. Ober, D. Harriman. On the Use of Multiconstellation-RAIM for Aircraft Approaches. Proc.of ION GNSS 2006, Fort Worth, Texas, 25-26 September, 2006, pp.2587~2596.
[4]秘金钟,李毓麟.RAIM算法[J].测绘通报,2001(3):7一9
[5]秘金钟,李毓麟.卫星导航完备性监测的最新进展[J]. 测绘科学,2004(l):64-67
[6]王仁谦,一种多个粗差的定位与估值的方法[J],华侨大学学报(自然科学版),2004(2):153一155.
上一篇:GPS技术在地籍测量中的应用研究
