
三维激光扫描技术在水利工程地形测绘中的应用
1 引 言 地形测绘是水利工程规划和建设的基础工作,如何有效提高地形测绘的工作效率,一直是广大测绘工作者的研究方向。三维激光扫描技术是测绘领域继GPS技术之后的又一次技术革新,它能在较短的时间内获得较多且准确的点云数据,使数据的采集更加便捷,...
- 作者:崔亦芳,丁双林,施 攀,陈晓来源:2014测绘学|2015年01月04日
1 引 言
地形测绘是水利工程规划和建设的基础工作,如何有效提高地形测绘的工作效率,一直是广大测绘工作者的研究方向。三维激光扫描技术是测绘领域继GPS技术之后的又一次技术革新,它能在较短的时间内获得较多且准确的点云数据,使数据的采集更加便捷,已在模型重构、虚拟现实等三维模型方面得到大规模应用。由于至今还没有一套完整、成熟的基于点云数据的地形图测绘软件,在成图的过程中需要交互使用到不同的软件,制约了其在地形测绘工作中的应用。笔者根据青海省海西州那棱格勒河水利枢纽工程实例,介绍利用三维激光扫描技术测绘水利工程地形图的一些经验和体会。
2 三维激光扫描仪的工作原理
激光具有单色性、高亮度、相干性、方向性等特性,将其作为一种测距载体,能够在精度、速度、可操作性方面超越其他的测量方式。20世纪90年代后,随着激光、计算机和传感器技术的发展,三维激光扫描仪在精度、速度、抗干扰等方面得到了显著提升,作业距离增加,操作难度和采购价格不断下降,扩大了该技术的应用领域。
常用的扫描仪根据测距方式可划分为三角式,脉冲式和相位式。由于三角式和相位式测量范围小(0.5-100m),脉冲式测量范围大(1-6000m),所以用于测绘工作的扫描仪绝大部分为脉冲式。脉冲式三维激光扫描仪采用非接触式高速激光测量的方法,以点云形式表现目标物体表面的几何特征。其测距方式是由激光发生器发射出CLASSⅠ级激光脉冲,投射到被测量物体上后,由接收器接受到反射光,参考高精度时钟记录下激光脉冲往返时间差。测距仪与被测物之间的距离即为光速和时间差乘积的一半。光速的精度可以通过准确测量影响大气折射率的几个条件(气温、气压等)来提高,时间的精度可通过一系列的判别技术来提高。在测距的同时,仪器通过内置角度测量系统来量测每一激光束的垂直角和水平角,进而获得每一个扫描点在扫描仪所定义坐标系内的X、Y、Z坐标值。三维激光扫描仪在记录激光点三维坐标的同时也会将激光点位置处物体的反射强度值记录,并称之为“反射率”。脉冲式三维激光测量原理如下图所示:
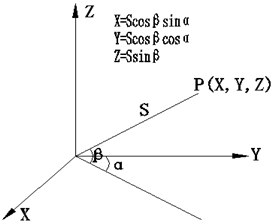
图1脉冲式三维激光测量原理图[1]
3 三维激光扫描技术的工程应用
3.1 工程简介
那棱格勒河发源于昆仑山脉布喀达坂峰的北坡,向西北注入台吉乃尔湖,全长404 Km,流域面积20790 Km2,洪水期流量414 m3/s,是柴达木盆地最大的一条内陆河流。那棱格勒是蒙古语,意为“又长又细的河流”。那棱格勒河水利枢纽工程位于青海省海西州,是柴达木循环经济试验区重点建设项目,集引水、发电于一体,拟建坝高120m。坝址区及库区淹没范围为无人区,几乎无植被。项目原计划采用航空摄影测量方法测绘地形图,但作业期间始终不具备飞行的气象条件,为在甲方要求的工期内完成15.6 Km2的地形图测绘任务,经研究决定将三维激光扫描技术应用于地形图测绘工作,测图比例尺为 1:2000,基本等高距为2 m。
3.2 外业操作
使用1台RIEGL VZ-1000三维激光扫描仪进行扫描作业。其最远扫描距离达1400m,水平范围达360°,垂直范围达100°(+60°至 -40°)。RIEGL独有的全波形回波技术和实时全波形数字化处理分析技术,可完整描述被扫描目标的细节信息,能够在恶劣环境下完成高难度的测绘任务。数据处理软件为仪器标配的RiSCANPRO软件包与南方cass9.1成图系统。三维激光扫描仪在作业过程中,可以理解为一个自动观测的免棱镜全站仪,在仪器可视范围内的地形点可见即可得,其作业过程如下:
3.2.1 选择架站位置
为了尽可能多的观测到地面信息,架站位置的选择以便于保存、方便使用为原则,并有利于其他测量手段进行扩展、联测,周围视线应尽量开阔。经过对测区实地查勘,通过优化设计,从前期完成的12个E级GPS控制点中选出8个作为设站点。
3.2.2 扫描作业
按照常规测量作业方法分别在测站上架设扫描仪,对中整平。RIEGL VZ-1000扫描仪扫描出的空间点云数据是以激光发射器为中心的自定义空间极坐标系,为使点云数据与实地工程坐标系一致,通过操作手簿将测站坐标和后视点坐标输入,由RiSCANPRO软件求出平移和旋转参数,为空间极坐标系原点赋予x,y,z坐标和正北方向之后,瞄准后视标靶进行定向,定向完成进行数据的预获取,确认实测后视点坐标与已知坐标数据的差值在限差之内时,开始扫描作业。由于地形起伏,RIEGL VZ-1000自动扫描的沟、梁、坎、路数据不准确或不完整,扫描仪操作员进行局部精扫描,并指挥司尺员使用标靶进行定点补充测量。
一个测站完成之后,迁到下一站重复上述过程,测区分8站对成图区域进行扫描作业,数据获取完整。为后期数据拼接工作的需要,保证相邻测站之间的扫描范围有30%以上的重合率。
3.2.3 数据检测
数据扫描完成后,采用GPS-RTK对测区部分特征点进行测量记录,利用这些数据对点云进行精度验证。
3.3 数据编辑
RIEGL VZ-1000理论扫描速度为12000点/秒,其数据量远远大于常规仪器所采集到的成图数据,内业处理的工作量极大,对计算机的硬件配置和编辑人员的业务素质要求较高。
3.3.1 数据预处理
将外业采集的数据在RiSCANPRO软件中进行预处理,复核现场输入的测站与后视坐标信息,同时将GPS-RTK实测的特征点导入比对,确认点云数据配准到正确位置。由于外部环境的变化和测量设备系统内部的影响,RIEGL VZ-1000扫描的数据不可避免地包含多种噪点:裸岩表面点、流动物体点等,需要分别或综合使用孤点过滤、拓扑过滤等不同方法剔除噪点,然后对数据进行必要的平滑处理。
3.3.2 特征提取
RiSCANPRO软件可以使用不同视图模式(二维、三维、全景视图)显示获得的扫描数据,每个点都有实际位置的颜色信息,能直观地在图中看到地形与地物形状。对于能完整观察到的特征线,比如沟、梁、坎、路等,要捕捉特征点、线,注记分明,导出为单独的dxf格式文件,结合补充测量的特征数据为地形图编辑作准备。
3.3.3 数据拼接
为保证测绘成果的一致性,需要对各站扫描数据进行拼接工作。现在常用的是迭代最近点算法,该算法采用点集对点集的迭代算法,可以拟合出相匹配的起伏曲面[2]。RiSCANPRO软件对其进行了补充完善,一般情况下,原有数据差值越小拼接效果越好。结合测区实际情况,以相邻2个测站之间6对以上同名点的关联进行点云数据的拼接,同时生成拼接误差分析报告,结合补充测量的特征数据,在满足限差要求之后,分区域完成测区数据拼接。
3.3.4 数据过滤
三维激光扫描仪获取的点云非常密集,存在大量冗余,为减少后续计算的工作量,消除多余点云对计算结果的影响,数据过滤在整个数据编辑过程中处于重要环节。根据测区实际情况,应用曲率采样的方法对点云数据进行过滤,基本思想是:在曲率大的区域保留足够多的点以完整精确地表示曲面特征,在相对平缓的区域则保留较少的点[3]。在满足精度要求的前提下,经数据过滤后保存78300个点。

图2过滤前数据

图3过滤后数据
3.3.5 生成地形图
RiSCANPRO软件将处理好的数据导出为dxf格式文件,用南方cass软件打开,再导入补充测量的特征数据和特征点、线文件,依据有关技术标准进行编辑,然后构建三角网,绘制等高线,生成地形图成果,最终图形文件的格式为dwg格式。
3.4精度分析
目前对三维激光扫描技术的精度评定尚不全面,为直观反映扫描数据生成地形图的成果精度,分别选取7站成图区域内的GPS-RTK实测点和地形图上的同名点进行了比较,详情如下表所示:
地形图精度统计表
|
序号 |
面积/点数 (km2/个) |
平面统计 [ΔΔ] |
高程统计 [ΔΔ] |
地物点平面 位置中误差 |
高程注记点中误差 |
|
1 |
2.3km2/20 |
20.89 m |
6.27 m |
1.02 m |
0.56 m |
|
2 |
2.7km2/30 |
34.67 m |
8.25 m |
1.08 m |
0.52 m |
|
3 |
1.8km2/30 |
37.27 m |
10.21 m |
1.11 m |
0.58 m |
|
4 |
1.6km2/17 |
19.56 m |
7.35 m |
1.15 m |
0.43 m |
|
5 |
2.5km2/14 |
18.05 m |
7.77 m |
1.29 m |
0.56 m |
|
6 |
1.9km2/25 |
21.43 m |
8.22 m |
0.93 m |
0.57 m |
|
7 |
1.8km2/25 |
20.65 m |
8.69 m |
0.91 m |
0.59 m |
根据《测绘成果质量检查与验收》(GB/T 24356-2009)对于检测点数的规定,表中检测点数量少于20时,以误差的算术平均值代替中误差;大于20时,按中误差统计。中误差统计公式为:
Μ=±![]()
式中,Μ为成果中误差,Δ为坐标较差,n为检测点数[4]。
《水利水电工程测量规范》(SL-197-2013)对1:2000比例尺地形图的精度规定为:地物点平面位置中误差≤±1.6m(图上0.8mmm),高程注记点高程中误差≤±0.67m(三分之一基本等高距) [5],则成果精度满足限差要求。
3.5 工程总结
在适合三维激光扫描仪作业的环境背景(无人区,几乎无植被)下,由于高新技术的应用,本次地形测绘任务在甲方要求的工期内完成。共历时4天,其中外业数据扫描2天,内业数据编辑1天,对编辑好的地形图实地巡视检查0.5天,内业修改处理及质量评定0.5天。如果采用常规测量手段,不可能在规定时间内完成地形测绘任务。
4 三维激光扫描技术应用中的注意事项
为了保证三维激光扫描仪的作业效率和成果精度,在作业过程中应注意以下事项:
(1)受扫描仪本身测距、测角精度限制,随扫描距离的增加,被测点精度会逐渐降低,为此应依据不同比例尺地形图精度要求,合理确定扫描有效范围,并通过测区实地查勘和架站点方案设计予以保证。
(2)RIEGL VZ-1000三维激光扫描仪通过确定后视标靶在仪器坐标系与工程坐标系的之间的相互关系来实现点云数据的坐标转换。获取点云数据的成果精度受两方面影响,一方面是对标靶的扫描精度,另一方面是标靶后视点的地面实测精度。因此在提高标靶坐标精度的同时,还应依据标靶扫描距离确定标靶目标的大小,保证其准确、清晰。
(3)数据编辑过程中的点云数据拼接工作,需要相邻测站之间的扫描范围有一定重合率。重合率过大,会增加外业工作量,重合率过小,影响拼接精度。实际工作中需要根据测图比例尺和测区实际情况具体掌握。
(4)受目前地形图测绘软件的制约,外业扫描过程中应充分考虑后续数据编辑工作的需要。对关键区域、地形特征点可使用其他测量手段同
步实测,以便于剔除点云数据中的非地貌数据,同时利于对扫描数据精度进行必要的验证。
5 结 语
水利工程大多建设在困难偏远的山区,交通不便,地形复杂。三维激光扫描技术能够在短时间内采用非接触主动式测量,直接获取大范围内的空间三维数据,具有扫描速度快,实时性强,主动性强,数字化程度高等特点,能显著提高测量效率,降低外业劳动强度,有良好的社会效益和经济效益。
参考文献
[1]李超.三维激光扫描技术在特殊结构测量中的应用[J].测绘通报,2014(1):71-73.
[2]张永光,刘豪杰,尹小磊,等.点云数据多站拼接在水利工程测绘中的应用 [J].华北水利水电学院学报,2013,34(3):74-77.
[3]郑德华.三维激光扫描数据处理的理论与方法[D].上海:同济大学,2005.
[4] 曾衍伟,谭明建,唐翼德,等. GB/T 24356-2009测绘成果质量检查与验收 [S].北京:中国标准出版社,2009.
[5]杨爱明,严建国,丁万庆,等.SL 197-2013水利水电工程测量规范 [S].北京:中国水利水电出版社,2013.
上一篇:高层建筑沉降监测方案设计
