 RSS����
RSS����GPS/GLONASS Orbit Determination Based on Global IGS Data
Li Ran1,2 ,Zhao Chunmei2, He Zhengbin2, Liu Xinrui2 ,Huang Huadong1,2
(��Geomatics College, Shandong University of Science and Technology, Shandong 266590
��ChineseAcademy of Surveying and Mapping, Beijing 100830)
Abstract: This paper studied the the basic problem about precise orbit determination of GPS /GLONASS navigation constellation; then, discussed the basic process about how to determine GPS/GLONASS navigation constellation orbits; at last, to evaluate the accuracy of this orbit, this paper compared the orbit with final orbit products produced by IGS. The results showed that: using the paper��s strategy, the float orbit solution accuracy is better than 6cm, while the fix orbit solution accuracy is better than 4cm.
Key Words: GPS; Double-Difference phase data; satellite orbit determination; dynamic method
1 ǰ��
�������Ǿ��ܹ����ȷ���ǽ��о��ܶ�λ�Ļ����������ǵ�����λ�Ĺ����е�����������Ϊ��̬��֪�㣬��˵������ǹ��ȷ���ľ���ֱ��Ӱ�쵼����λ�ľ��ȣ����ԣ�Ҫ���ø߾��ȵĶ�λ��������ܹ����ȷ���쳣��Ҫ��Ŀǰ���ҹ����ڴ�����չ�����������ǵ���ϵͳ���ƻ���2020�������ɹ������а���5�ŵ���ֹ������Ǻ�30�ŵ���Ǿ�ֹ�������[1-2]���о�GPS��GLONASS���Ǿ��ܹ����ȷ�������ڷ�չ�������ǵ���ϵͳ���кܺõĽ�����塣
��1994�����GNSS������ѧ������֯IGS��International GNSS Services�������������������Ǿ��ܶ��������õ��˺ܴ�����������ſ��Եõ��۲����ݵ���������վ�����࣬�Լ����ݴ������ԵIJ������ƣ�����IGS���ݴ������ĵĶ��쾫�Ⱥ��ȶ��Զ��ڲ��ϵ���ߡ��ܶ�ѧ�߶Ծ��ܶ��켼��������������о�[3-9]������ȫ��GNSSϵͳ�IJ������ƣ���ϵͳ���϶��������Ϊһ���о��ȵ㡣���������϶���ʱ��һЩ���������۲������ܹ��õ���ǿ�������ܹ��õ��ܺõ�Լ�����Ӷ��Ľ��˶�������
���Ľ�����64��վ��IGS���ݽ���GPS/GLONASS���ǵĵ��측��⼰����̶��⣬��̽��GPS/GLONASS���Ǿ��ܶ�������̡���ʹ�õ���ѧģ�͡�Ԥ����������ģ���ȹ̶����ԡ�
2 GPS/GLONASSʱ��ͳһ
GPSϵͳ����GPST��������ԪΪ1980��1��1��0ʱ��UTCʱ�䣩��Ϊ�˱�֤GPST�������ԣ�����������������������ԭ��ʱ���̶ֹ��������19s��GLONASS��ʱ������GPS�Ķ��岻ͬ��������GLONASST����ʱ��ϵͳ��Ī˹�Ƶ���������Э��ʱUTC��SU������һ�£�����3Сʱ�ĵط�ʱ��,��GPST��ͬ���ǣ�GLONASST��UTC(SU)ͬ�����룬���GLONASST�����ԭ��ʱû�й̶�������ʵ���ϣ����ջ����յ���GLONASS�����ļ��еIJ�����Ϣ���ǽ�����GLONASST�£�����UTC��ͨ������[10]�ɵ�GPST��GLONASSϵͳ��![]() ��ת����ϵ��
��ת����ϵ��
���У�nΪ����UTC��AIT(ԭ��ʱ)֮��ĵ���������Ȼ����GLONASST��������Ԫ��UTCʱ1996����4��һ���ڡ������ڽ���ʱ���˼����������жϵ�ǰ�۲�ʱ���������Ԫ�������������벻�迼�����ڣ������ڲ�ͬ��ݵĹ۲����ݣ�n��ֵ������ͬ��
�����ǵ���ϵͳ��ʱ��ϵͳ��ά��һ����������ϵͳΪ��֤ϵͳ�����ԺͲ�Ʒһ���ԣ��������˸��Ե�����ο���ܣ�GPSϵͳ�㲥��������WGS84����ϵ���������������IGSϵ�вο���ܣ�GLONASSϵͳ�㲥��������PZ90����ϵ��������ͳһ���棬PZ-90��WGS-84��ת����MCC�õ���Ŀǰ������߾��ȵIJ������߲�������ģ�ͽ���ת��[11]�����߲���������ʽΪ�� (2)
(2)
3 GPS/GLONASS���Ǿ��ܹ��ȷ��
3.1 ���Ǿ��ܶ�������
���Ķ������Ǿ��ܹ��ȷ����Ϊ�������֣����ȣ������ǵĹ㲥�������γɵĹ����Ϊ���죬ͨ����ԭʼ���ݵ�Ԥ�������ټ�����ѧģ�ͣ��Ӷ��Թ�����в������ƣ��õ����ǹ���ĸ���⣻Ȼ�������ǹ���ĸ����Ϊ��������ģ���ȹ̶����Ӷ��õ����ǹ���Ĺ̶��⡣
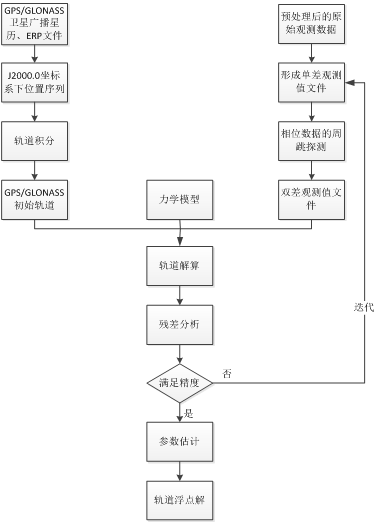
ͼ1Ϊ���ǹ�������ȷ�����̣����ȣ��ɹ㲥�����γɹ���ϵ�µ�λ�����У���ͨ��������֣��õ���ʼ�����ͬʱ��ԭʼ�۲�����ͨ��Ԥ�����������γ�˫��۲��ļ����ڴ˻����ϼ�����ѧģ�ͣ�ͨ���������õ���λ�в��������0.004m��Ϊ��粻���㾫�ȣ��������γɵ���۲��ļ������е����������㾫�Ⱥ��в������Ƶõ�����ĸ���⡣
�ڻ��߽���Ĺ����У�������С���˷������������ĸ��������õ���Ծ�ȷ�����ǹ�����������Dz�û�ж�ģ���Ƚ��й̶���Ϊ�˸���һ����߹�����ȣ���Ҫ������ģ���Ƚ��й̶���
3.1.2���ǹ���̶���
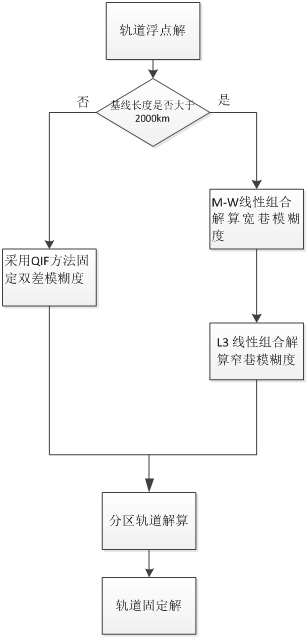
����ģ������ȷ�̶���������Լ���δ֪�����ĸ�������ˣ���ȷ�Ĺ̶�ģ���Ȳ�����������Ч����߶���ľ��ȡ�ͼ2��Ϊ���ǹ���̶���ȷ������ͼ����Ϊ�����е���֮���γɵĻ������������г����ߣ���ˣ����ݻ��߳����Ƿ����2000km���ò�ͬ��ģ���ȹ̶����ԣ������߳���С��2000kmʱ����QIF������ֱ�ӽ��L1��L2��ģ���ȣ��÷�����Ҫ�������г�����ģ���ȵķֽ���㣬��������в����õ�˫Ƶα�࣬������Ҫ���ǵľ����������������õ�˫Ƶ�۲����ݣ������߳�����2000km����ʱ����������M-W��Ϲ۲�ֵ��������ģ���ȣ�Ȼ��������L3��Ͻ����խ��ģ���ȣ����ˣ�ģ���ȵõ��˹̶���ͨ������������㣬��õ��˹���Ĺ̶��⡣
3.2 ����ģ��
���IJ��ö���ѧ���췽�����ڹ�������в����˸��ֲ���ģ�ͺ���ѧģ�ͣ�����ģ�����1��ʾ��
��1 GPS�����������ܹ��ȷ���в��õIJ���ģ�ͺ���ѧģ��
|
����ģ�ͼ���ѧģ�� |
���� |
|
�۲��� |
LC˫��������Ϲ۲�ֵ |
|
��ֹ�߶Ƚ� |
3 |
|
������� |
180s |
|
��λ���ļ���仯 |
PHAS_COD.I08 |
|
������ |
����NEIL+վ�ֶ����Թ��ƣ�2Сʱ�� |
|
�����Ӳ� |
˫������ |
|
���ջ��Ӳ� |
���ջ���GPSʱ��ͬ����˫������ |
|
��վ���� |
IGSվ����Ϊ����ֵ����ʩ��Լ�� |
|
��ʼ��� |
�㲥���� |
|
������ |
JGM3 ��12Î12�� |
|
�������� |
JPL DE405 |
|
��ϫ |
���峱ϫ������������ϫ |
|
̫����ѹ |
ECOM ��ѹģ�;Ų��� |
|
������ٶ� |
��������ÿ12Сʱ����һ��α���������� |
4 ��������
����ѡȡȫ����ȷֲ���64��IGSվ�����ṩ�Ĺ۲����ݣ�ʵ��۲�����Ϊ2012��1��5�գ�ͨ����IGS���չ����Ʒ�Ļ����ͳ�������ؾ����ؼ�������1D��������
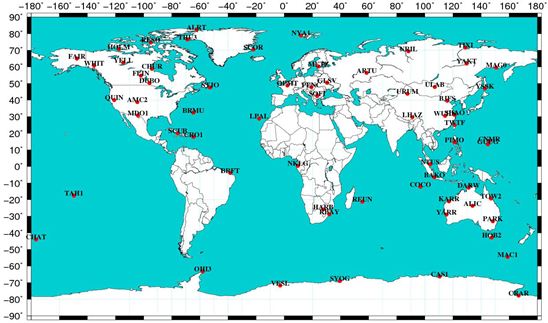
ͼ3 ���ھ��ܹ��ȷ����64��IGSվ�ֲ�ͼ
4.1 ģ���ȸ����
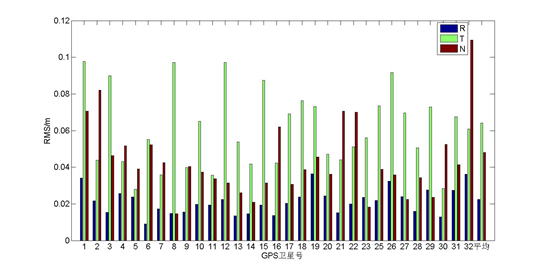
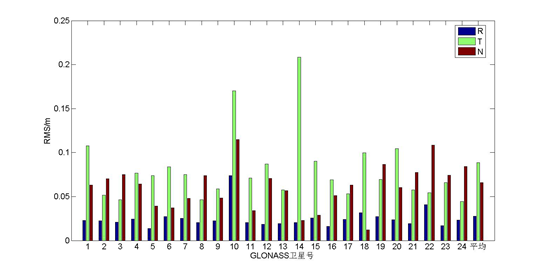
ͼ4 GPS���Ǹ������IGS�������RMS
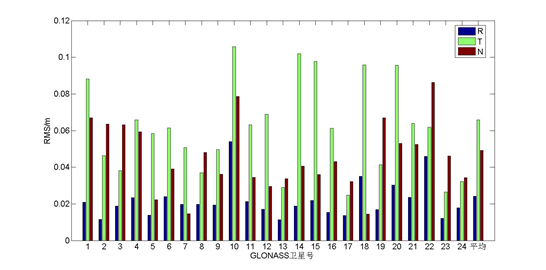
ͼ5 GLONASS���Ǹ������IGS�������RMS
ͼ4��ͼ5��ӳ�������ڵ������ݡ���ģ����δ�̶�ʱ��ͨ��ȫ��64��IGSվ�����ݽ��ж��죬GPS�����CODE���չ�����бȽϣ��ؾ�������Ĺ������RMS�ľ�ֵΪ2.24cm��6.42cm��4.80cm��1D RMSΪ4.80m��GLONASS�����CODE���չ�����бȽϣ��ؾ�������Ĺ������RMS�ľ�ֵΪ2.75cm��8.85cm��6.57cm��1D RMSΪ6.56cm.���Կ������������Ĺ�������������ھ����ؼ������Ƚ��ȶ����仯���Ȳ�����˵�����������õĶ�������ǿ��еġ�
4.2 ģ���ȹ̶���

ͼ6 GPS���ǹ̶�����IGS�������RMS
ͼ7 GLONASS���ǹ̶�����IGS�������RMS
ͼ6��ͼ7��ӳ�������ڵ������ݡ���ģ���ȹ̶�ʱ��ͨ��ȫ��64��IGSվ�����ݽ��ж��죬GPS�����CODE���չ�����бȽϣ��ؾ�������Ĺ������RMS�ľ�ֵΪ1.59cm��3.17cm��2.31cm��1D RMSΪ2.44cm��GLONASS�����CODE���չ�����бȽϣ��ؾ�������Ĺ������RMS�ľ�ֵΪ2.42cm��6.58cm��4.92cm��1D RMSΪ4.95cm�����Կ����������Ǹ����ǹ̶��⣬����ؾ���������С��������Σ����ؼ���������������Ƕ���ѧ�����һ����������Ϊ����ؼ��������û��ͨ����ѧģ�ͺܺõ�ģ�⡣
���⣬��ͼ�п��Կ���GLONASS�Ķ������ձ����GPS�Ķ�������ԭ�����ΪGLONASS���ǵĹ۲����ݽϲ�����������ƣ����Ҫ��һ���ķ�����
4.3 ����⡢�̶�����IGS����ȽϽ��
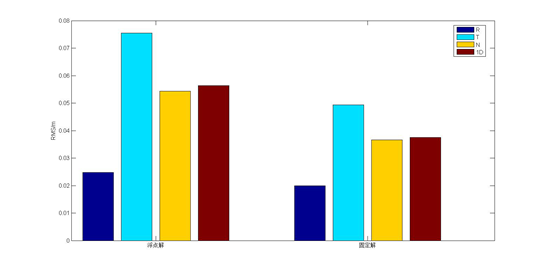
ͼ8 ����⡢�̶�����IGS����ȽϽ��
��ͼ8���Կ�����GPS/GLONASS����ͨ����CODE���չ�����бȽϣ������ƽ��Ϊ5.64cm�����̶�ģ���Ⱥ�õ��Ĺ̶���ƽ��Ϊ3.75cm����ӳ���̶�ģ�����������ظ��ƹ���ľ��ȣ�˵��ģ���ȵĽ�������DZȽ���Ч�ġ�
5 ����
����64��ȫ����ȷֲ���IGSվ���ݣ���ģ����δ���̶�ʱ��GPS/GLONASS���ǹ��ͨ����CODE���������չ�����бȽϣ����������3cm���ң�1D RMSƽ����6cm�ڣ���ģ���ȹ̶�ʱ���������2cm���ң�1D RMSƽ����4cm֮�ڡ�
�����ǻ���64��IGSվ�����ݵĶ�������������IGSվ����������ɵ���Ϊ�������ܽ�ʱ�����ǹ���������Ż���������ߡ�
Ŀǰ�ҹ�������������ϵͳ����ȫ���������о�GPS/GLONASS���Ǿ��ܶ������������ǵ���ϵͳ�ṩһЩ����IJο������������Ա����о�����Ϊ�������Ա������Ǿ��ܶ���������н�һ�����о���
<!--[if !supportLists]-->[1] <!--[endif]-->��Ԫϲ.�������ǵ���ϵͳ�Ľ�չ����������ս[J].���ѧ����2010,39��1��:1-6.
<!--[if !supportLists]-->[2] <!--[endif]-->Ƚ����.�������ǵ���ϵͳ�ķ�չ[C].���Ľ��й����ǵ���ѧ����ᣬ�人��2013.
<!--[if !supportLists]-->[3] <!--[endif]-->������. GPS���������������ǵľ��ܶ������ۺ������о�[D]. �人���人��ѧ��2004
<!--[if !supportLists]-->[4] <!--[endif]-->������. ����GPS�����Ǽ��η����������о�[D].�人: �й���ѧԺ��������������о���,2003
<!--[if !supportLists]-->[5] <!--[endif]-->����(1992) ,����������ǹ����ѧ,����: �ߵȽ���������.
<!--[if !supportLists]-->[6] <!--[endif]-->��ï��(1995) , GPS ���Ǿ��ܶ������ۼ������о�[D] ,�人���Ƽ���ѧ.
<!--[if !supportLists]-->[7] <!--[endif]-->¥�涰��2008��,��������ʵʱ���ܹ�����Ӳ�ȷ��[D].�人:�人��ѧ.
<!--[if !supportLists]-->[8] <!--[endif]-->Ҧ�˱�2004��,GPS���ܶ�λ��������㷨��ʵ��[D].�人:�人��ѧ
<!--[if !supportLists]-->[9] <!--[endif]-->ʢ���꣬Ԭ�˱��ﱣ��������ȫ��IGS���ݵ�GPS�����������ܹ��ȷ��[J]����ز����������ѧ��2011��(1)��138��141
[10]����ΰ,�����B,������,��. ����ʱ��ϵͳͳһ�ı�����GPS�ں϶�λ[J].���ѧ��2012,41(5):743-748.
[11]������,�ؽ���,��Ӣ��.ȫ������ϵͳԭ����Ӧ��[M].����:��������, 2007

