 RSS订阅
RSS订阅Ionosphere Integrity Monitoring Analysis Based on the Combined System of GPS and BDS
ZHAO Chuanhua; BEI Jingzhong; PAN Shan
(1.Shandong Agricultural University ; 2. Chinese Academy of Surveying & Mapping 3.Shandong Lutai Coal CO.LTD;)
Abstract: The ionosphere delay is assessed as the biggest error source after the United States cancelled SA policy, and its changes are the most complicate. Integrity is the ability which the system sending out warning signals to users when navigation system has any failure or error exceeding and therefore can’t be applied for navigation and positioning service. As far as the user safety is considered, the integrity of the navigation system weights more than its precision. The ionosphere integrity monitoring is indispensable in order to guarantee the reliability and availability of the user positioning. With the increase of the number of the Beidou satellites gradually, the BDS is more and more approaching perfection. In this paper, the combined systems’ data of GPS and BDS of the Hebei CORS are used to conduct ionosphere integrity monitoring. So the resizable of ionosphere delay and stable of ionosphere are discussed. The results show that the ionosphere delay calculated by these data is stable and these data are available.
Keywords: Ionosphere Delay; Reliability; Integrity Monitoring; BDS
1 引言
完备性是指导航系统发生任何故障或者误差超限,无法用于导航和定位时,系统向用户及时发出报警的能力。GNSS系统的精度可以根据用户要求,采用不同的算法实现不同的精度控制,但系统的完备性信息无论在何时何地都是必需的,它是用户对系统所提供信息的可信程度的一种度量,包括系统向用户提供及时有效的警告信息的能力,是保证用户安全性的重要参数[1]。
电离层延迟误差作为RTK用户定位的主要误差源之一,变化最为复杂(电离层在高纬度地区低频变化明显,低纬度地区高频变化明显),也是最难以精确建模的。而且,在某些情况下,一些电离层高阶项残差仍然会残留在虚拟参考站和流动用户构成的短基线中,并会对基线上的模糊度求解和坐标估计造成影
响,甚至出现流动端无法初始化的情况。因此,为了保证移动用户定位的可靠性和可用性,必须对电离层进行完备性监测[2] 。
目前国内外很多学者对电离层完备性监测进行了大量的研究,最显著地是Chen X.和周东卫的研究。Chen X.在2003年提出了两个非差电离层线性指标:电离层残差完备性监测指标(IRIM)和电离层残差内插不确定性指标(IRIU),并利用日本和德国的两个网络的数据进行分析,结果表明这两个指标可以较好地估计流动站端的电离层内插误差和电离层残余误差(Chen X.,2003)[3]。周东卫,2007年提出了基于双差的电离层完备性监测指标和对流层完备性监测指标,试验中利用四川省CORS网的数据对电离层进行完备性监测,取得了良好的效果。
本文采用河北省CORS网的实测GPS/BDS组合系统的数据,对部分基线进行电离层完备性监测,并得出了一些有益的结论。
2 算法过程
要监测组合系统的电离层完备性,首先需要计算组合系统的电离层延迟,要计算组合系统的电离层延迟必须搞清楚GPS/BDS组合系统的电离层延迟计算模型。由于两个系统的坐标系统和时间系统不同,所以第一步就需要进行时空系统的转换。
2.1 时空系统转换
1. 坐标系统的转换
(1)WGS84与CGCS2000坐标系的转换
两个不同的坐标系间进行转换,通常的方法是建立模型,确定两个模型间的转换参数。文献[4][5][6]介绍了常用的坐标转换模型-布尔莎模型(Bursa Model),介绍如下:
假设两个空间直角坐标系分别为![]() 、
、![]() ,图1是其转换关系的示意图:
,图1是其转换关系的示意图:

图1两个坐标系的空间转换关系
坐标转换的7参数布尔莎模型为:
 (1)
(1)
式中:![]() 为平移参数,
为平移参数,![]() 、
、![]() 、
、![]() 为为旋转参数,
为为旋转参数,![]() 为尺度因子。
为尺度因子。
如果得到3个以上地面点在不同坐标系中的坐标值(或差),便可得到两个坐标系间的转换参数。如果采用坐标差,其数学模型为:
 (2)
(2)
当坐标数多于3个时,采用最小二乘法解算得到最优转换参数。
文献[4]提到了另外一种解决坐标系间转换问题的方法,如果两个坐标系统的定义一致并且实现方法相同,即使得两参考框架的精度一致,则对于精度要求低于坐标系精度的用户而言,则不需要对坐标系进行变换。根据IERS定义协议地球坐标系的有关定义标准,WGS84、CGCS2000坐标系均遵循其定义,两坐标系都是地心坐标系,并且精度都达到5cm[4]。因此,对于某些对精度的要求在5cm以下的用户而言,可以认为WGS84和CGCS2000同属一个坐标系统,不必进行变换。
2.时间系统的转换
(1)GPS时
GPS为了满足精密定位与导航的需要,在系统设计与试验之初就建立了自己的时间系统,简称GPST(GPS Time)。GPST属于原子时,它的秒长和原子时是一样的,但原点与国际原子时不同。所以,GPST与IAT在任一秒内都存在一常量偏差,关系为:
![]() (3)
(3)
(2)BDS时
北斗时(BDT)是BDS系统建立、保持和发播的时间参考标准,是由多台高精度原子钟组成和保持的原子时。它的基本单位是秒,其秒长与国际原子时(IAT)相同,连续计数,不闰秒;它的初始历元为国际通用标准时间-协调世界时(UTC)2006年1月1日00h 00m 00s,采用周和周内秒计数。BDT与UTC的偏差(模1秒)小于100ns[8]。BDT与UTC之间的闰秒信息在导航电文中播报。
(3)GPST与BDT的转换
BDT与GPST之间的关系可以定义为:
![]() (4)
(4)
时空系统转换完后就可以进行下一步计算,进行电离层完备性监测。
电离层完备性监测的内容包括:双差电离层延迟的计算;电离层区域内插模型的建立;电离层残差完备性监测指标(IRIM)的计算;电离层残差内插不确定性指标(IRIU)的计算。
2.2双差电离层延迟计算
组合系统的电离层延迟算法源于普通的单系统电离层延迟算法,其基本思想就是将各卫星系统的观测量融合到同一个观测方程组中,根据单系统的算法建立各自的方程从而求得组合系统的电离层延迟[9]。现将GPS/BDS组合系统的电离层延迟模型进行简单介绍。
 (5)
(5)
 (6)
(6)
式中:下标G、B分别表示GPS系统和BDS系统;1、2分别表示两个频率。
2.3低阶曲面模型法
2001年,Dai对多种改正数内插模型包括LCM(Linear Interpolation Model)、LSM(Low-order Surface Model)、LIM(Linear Interpolation Model)、DIM(Distance Based Linear Interpolation Model)以及LSC(Least-Square Combination)进行了研究,认为各种内插方法在空间相关误差内插方面的效果并无显著差异[10]。基于上述分析,且由于低阶曲面模型法可以很好的逼近和拟合网络范围内电离层延迟的空间相关性[11],所以本文采用加权的低阶曲面模型对双差电离层延迟进行内插。
其数学模型为[12]: ![]() (7)
(7)
当参考站数目n≥3时可以求得改正数内插系数矢量的最小二乘解:
 ,
, ,
, (8)
(8)
![]() ,d为流动站到各参考站的距离,则流动站和主参考站之间的双差电离层延迟可表示为:
,d为流动站到各参考站的距离,则流动站和主参考站之间的双差电离层延迟可表示为:  (9)
(9)
其中,![]() ,
,![]() 、
、![]() 分别为同一坐标系下的坐标差值。
分别为同一坐标系下的坐标差值。
2.4电离层残差完备性监测指标(IRIM)的计算
IRIM的计算过程:基线间模糊度固定后,利用式(5)、(6)计算出各基线间的双差电离层延迟,然后采用几条基线(至少是2条)对其中一条基线的双差电离层延迟进行内插计算,比较内插基线的电离层估计值和内插值的差值,计算出每一历元所有卫星的加权(加权方法为高度角加权法)均方根RMS,然后对加权RMS进行累积(累积区间为1个小时)。IRIM指标也可以理解为对网络残差内插和模糊度求解的完备性监测。加权采用如下方法:
![]() (10)
(10)
式中,z为卫星在参考站上的天顶角。
2.5电离层残差内插不确定性指标(IRIU)的计算
IRIM虽然反映了电离层扰动的总体情况,但是对于某些用户来说,某一历元电离层延迟内插的不确定性仍然需要考虑,内插的不确定性可反映用户定位的可靠性,IRIU即用于该目的。
IRIU的原理:通过流动站周围的数个参考站(至少是4个),可形成多条基线构建区域内插模型,对内插标准差进行计算,该标准差代表了内插区域内流动用户端电离层的线性程度。然后对某一时刻所有构成的卫星对的内插标准差进行加权平均,IRIU即是该加权平均值[2]。
双差电离层延迟内插的标准差![]() 的计算过程如下:
的计算过程如下:
a.计算内插系数:  (11)
(11)
b. 内插系数a的单位权中误差: ![]() (12)
(12)
其中, ,
,![]() , d为流动站到各参考站的距离。
, d为流动站到各参考站的距离。
c. 内插系数a的协方差矩阵: ![]() (13)
(13)
d. 网络改正数![]() 的方差为:
的方差为: ![]() (14)
(14)
通过卫星对的双差电离层延迟的残差(绝对值)和其内插标准差的比较,检验电离层内插的不确定性,并用内插的标准差来表示流动站端电离层内插的不确定性。
3 算例分析
3.1双差电离层延迟计算
本文采用河北省CORS网的数据进行实验分析,数据采样间隔为30s。当模糊度固定后即可利用式(1)计算基线的双差电离层延迟。将组合系统的坐标系统和时间系统转换后,即可按模型计算组合系统的电离层延迟。这里以SZ站为主参考站,NP站为流动站进行分析研究,计算SZ-MC、SZ-LC、SZ-LX、SZ-NP四条基线的电离层延迟,如图2所示。
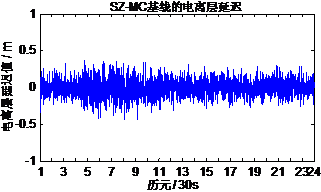
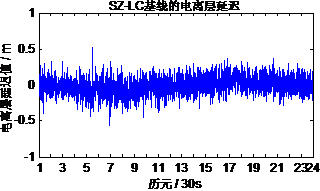
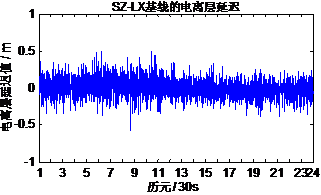
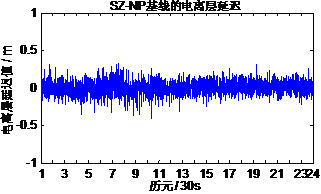
图2 双差电离层延迟
从图2可以看出大多数延迟值集中在0.5m以内,达到分米级精度,主要是这4条基线较长,造成电离层延迟值较大。在4~9点间电离层延迟值较大,分析其原因主要是因为河北属于东八时区,GPS时4~9点对应当地地方时的12~17点,此时太阳辐射较为剧烈,电离层活动也较剧烈,因此电离层延迟较大。GPS时18~3点对应当地地方时的2~11点,该时段主要是晚上和上午,太阳辐射微弱,电离层活动也不剧烈,因此电离层延迟较小。
此外,组合系统计算的电离层延迟变化同样与基线长度具有相关性。比较电离层延迟变化比较剧烈的时段(即GPS时3~9点)上4条基线的双差电离层延迟最大值,SZ-LX基线的最大值为0.50m、SZ-LC基线的最大值为0.53m、SZ-MC基线的最大值为0.37m、SZ-NP基线的最大值为0.34m,结合4条基线的长度情况,可看出双差电离层延迟值随着基线长度的增加而增大。
3.2 低阶曲面内插模型的建立
计算出组合系统的电离层延迟后,同样利用加权的低阶曲面内插模型内插流动站与主参考站基线上延迟值的估计值,从而计算内插残差。
内插值与计算值的残差如图3所示。由图3可看出内插残差均在厘米级精度,经统计最大值为0.052m,平均值为0.000072m,标准差为0.016m。经统计内插残差在4cm以内的占99.5%,在5cm以内的占99.9%,精度较高。
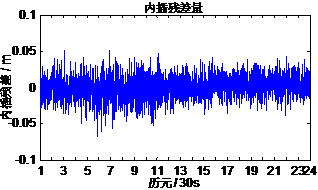
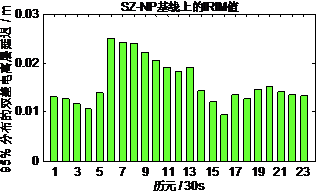 图3 计算值与内插值的差值 图4 SZ-NP基线上的IRIM值
图3 计算值与内插值的差值 图4 SZ-NP基线上的IRIM值
3.3 电离层残差完备性监测指标(IRIM)计算
图4是SZ-NP基线的IRIM图(累积区间为1小时),可看出IRIM值的总体变化还是比较平稳的,和双差电离层延迟的变化趋势(图1)大体相同。在GPS时6点的时候IRIM出现最大值,这是由于GPS时6点对应当地地方时的14点,此时正是电离层活动剧烈的时候,电离层延迟较大,导致IRIM也较大,GPS时6~10点的电离层残差偏大,IRIM也很好地反映了这一点。
3.4 电离层残差内插不确定性指标(IRIU)计算
当求出内插标准差后,对其进行加权平均(加权策略如式10),即可得到电离层残差内插不确定性指标IRIU。
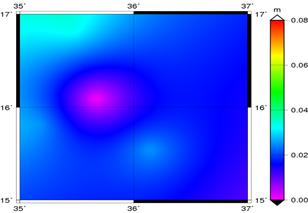
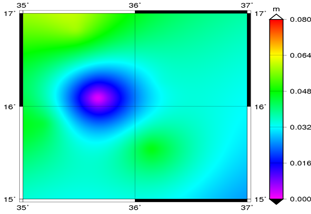
图 5 8:00时刻全网的IRIU值 图 6 15:00时刻全网的IRIU值
图5和图6分别为GPS时8:00、15:00时刻的4条基线计算的IRIU图。该图直观地反映了两时刻区域范围内双差电离层延迟残差在空间上的分布情况。总体来看该区域内IRIU是以紫色点为中心向外扩散,IRIU逐渐增大。图6和图5相比IRIU值要相对大一些,说明此时刻的电离层残差较大,导致内插精度较低,不确定性偏大一些。但总体来看,电离层还是处于平静状态。说明测区上空的电离层延迟适宜,电离层活动稳定,计算指标可靠,数据可用。
4 结语
通过对4条基线的双差电离层延迟进行计算和分析,可看出大多数延迟值集中在0.5m以内,均达到分米级精度,而且电离层延迟存在明显的时空变化规律。经实验验证,加权的低阶曲面模型可以应用于电离层延迟的内插中,内插精度达到厘米级精度。电离层残差完备性监测指标(IRIM)可以监测电离层残差的有效性,而电离层残差内插不确定性指标(IRIU)反映了某时刻区域范围内电离层延迟在空间上的分布情况。经监测用河北省CORS网的GPS/BDS数据计算的双差电离层延迟较稳定,上空的电离层处于平静状态。对电离层较为活跃的时段进行电离层完备性监测将是下一步研究的重点。
参考文献
1 秘金钟.GNSS完备性监测方法、技术与应用[D]. 武汉:武汉大学, 2010. 18-20.
2 周东卫.虚拟参考站_VRS_技术的质量控制和完备性监测研究[D]. 四川:西南交通大学, 2007. 50-60.
3 Xiaoming Chen, Herbert Landau, Ulrich Vollath. New Tools for Network RTK Integrity Monitoring [A].Proc. of ION GPS/GNSS, Protland OR, 2003. 1355-1360.
4. 焦文海.卫星导航系统坐标基准建立问题的研究[D]. 上海: 中国科学院上海天文台, 2003. 23-44.
5. 刘亚平,郑若奇,曹立强.GPS定位中两种七参数坐标转换方法的误差分析[J]. 中国港湾建设, 2005, 3:24-27.
6. 陈俊勇.关于中国采用地心3维坐标系统的探讨[J]. 测绘学报, 2003 , 11: 283-288.
7. 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M]. 北京: 测绘出版社, 2007. 98-111.
8. 陈洪卿,陈向东.北斗卫星导航系统授时应用[J]. 导航讲座, 2011 , 6: 54-55.
9. 周玮.基于DSP的GPS/BD-2组合定位算法的研究与实现[D]. 武汉: 武汉理工大学, 2008. 21-29.
10 邱蕾,陈远鸿,段艳霞.GPS网络RTK流动站的电离层误差改正分析[J]. 大地测量与地球动力学, 2010 , 2(30) : 57-58.
11 黄丁发,周乐韬,李成刚等. GPS增强参考站网络理论[M]. 北京: 科学出版社, 2009.

