 RSS订阅
RSS订阅1 引言
利用GNSS可以比较经济、快速、可靠地确定运动载体的位置及速度,它可以应用于机载、车载以及武器试验与测试等速度测量[1]。目前,进行GNSS测速的方法主要有载波相位差分、位置差分和原始多普勒观测值等3种方法[2]。载波相位差分在周围环境复杂时,信号容易受到干扰,周跳频繁[3-4]。因此,本文主要讨论后两种方法,分析它们的联系与区别。同时,考虑到BDS卫星导航系统与GPS卫星导航系统有着不同的卫星空间结构[5],且BDS测速的精度研究较少,因而本文初步探讨了位置差分方法和原始多普勒观测值方法进行BDS测速的精度。
2 位置差分测速
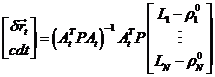
根据历元![]() 和
和![]() 的位置向量
的位置向量![]() 和
和![]() ,求解历元
,求解历元![]() 的载体速度:
的载体速度:
![]() (1)
(1)
其中,![]() 为载体在历元
为载体在历元![]() 的速度;
的速度;![]() 为采样的时间间隔。载体在历元
为采样的时间间隔。载体在历元![]() 的位置向量由式(2)求得:
的位置向量由式(2)求得:
![]() (2)
(2)
其中,![]() 为卫星伪距观测向量;
为卫星伪距观测向量;![]() 为设计矩阵;
为设计矩阵;![]() ,由三个位置向量参数
,由三个位置向量参数![]() 和一个载体钟差参数
和一个载体钟差参数![]() 组成,
组成,![]() 为光速;
为光速;![]() 为观测噪声向量。当观测到
为观测噪声向量。当观测到![]() 颗BDS卫星,并线性化时,设计矩阵为:
颗BDS卫星,并线性化时,设计矩阵为:
 (3)
(3)
其中,![]() 为卫星
为卫星![]() 的位置向量;
的位置向量;![]() 为载体近似位置向量;
为载体近似位置向量;![]() 为载体与卫星
为载体与卫星![]() 的近似几何距离。载体位置改正向量
的近似几何距离。载体位置改正向量![]() 由最小二乘原理可得:
由最小二乘原理可得:
 (4)
(4)
其中,![]() 为观测值权阵。
为观测值权阵。
3 原始多普勒观测值测速
卫星与载体之间的相对运动将产生频率漂移,这就是多普勒频移,可表达为[6-8]:
![]() (5)
(5)
其中,![]() 为卫星发射信号频率;
为卫星发射信号频率;![]() 为载体接收到的卫星信号频率;
为载体接收到的卫星信号频率;![]() 为载体与卫星连线的径向相对速度。由此,卫星
为载体与卫星连线的径向相对速度。由此,卫星![]() 的多普勒观测值方程为:
的多普勒观测值方程为:
![]() (6)
(6)
其中,![]() 为载体钟差变化率;
为载体钟差变化率;![]() 为观测值噪声。
为观测值噪声。![]() 的表达式为:
的表达式为:
![]() (7)
(7)
其中,卫星位置向量![]() 和速度向量
和速度向量![]() ,可由导航电文计算而得。对式(7)线性化:
,可由导航电文计算而得。对式(7)线性化:
 (8)
(8)
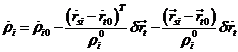
其中,![]() 为几何距离变化率近似值;
为几何距离变化率近似值;![]() ,
,![]() 为载体位置和速度的近似值,
为载体位置和速度的近似值,![]() ,
,![]() 为相应的改正数。
为相应的改正数。![]() 由式(4)确定后,式(6)可写为误差方程形式:
由式(4)确定后,式(6)可写为误差方程形式:
![]() (9)
(9)
其中,
 (10)
(10)
由最小二乘原理可得未知参数改正向量:
![]() (11)
(11)
其中,![]() 为观测值权阵。
为观测值权阵。
由式(1)可知,位置差分法只有在载体做匀速运动时才成立,因而其测速精度受载体运动状态影响;由式(11)可知,原始多普勒观测值法测速主要受多普勒观测值精度影响,基本不受载体运动状态影响,因而其静态测速精度可作为动态测速精度的参考。
4 算例分析
本文使用一台泰斗GPS/BDS双模接收板于2013年4月进行了静态试验,数据采样间隔为1s。接收机位置采用单点定位结果,采用4种方案进行测速:
<!--[if !supportLists]-->1. <!--[endif]-->GPS位置差分测速,2s间隔;
<!--[if !supportLists]-->2. <!--[endif]-->BDS位置差分测速,2s间隔;
<!--[if !supportLists]-->3. <!--[endif]-->GPS原始多普勒观测值测速;
<!--[if !supportLists]-->4. <!--[endif]-->BDS原始多普勒观测值测速。
把0 m/s作为静态测速的真值,四种方案与真值做差。图1~3给出了方案1中三个方向测速与真值的比较。图4~6给出了方案2中三个方向测速与真值的比较。图7~9给出了方案3中三个方向测速与真值的比较。图10~12给出了方案4中三个方向测速与真值的比较。四个方案,三个方向速度偏差的标准差统计如表1。
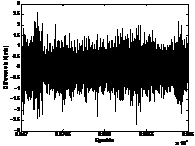

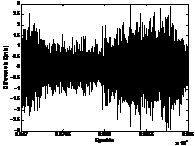
图1 方案1 X方向速度误差 图2 方案1 Y方向速度误差 图3 方案1 Z方向速度误差


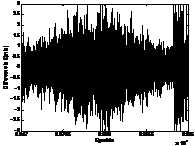
图4 方案2 X方向速度误差 图5 方案2 Y方向速度误差 图6 方案2 Z方向速度误差
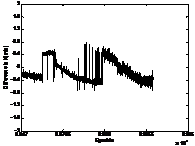
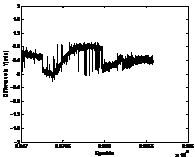
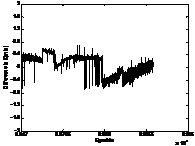
图7 方案3 X方向速度误差 图8 方案3 Y方向速度误差 图9 方案3 Z方向速度误差

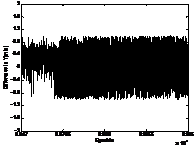

图10 方案4 X方向速度误差 图11 方案4 Y方向速度误差 图12 方案4 Z方向速度误差
对比方案1和方案3,采用位置差分法GPS测速,大偏差和小偏差交替产生,大的偏差超过±2m/s;采用原始多普勒观测值测速法GPS测速,偏差变化基本平稳,集中在±0.4m/s。
对比方案2和方案4,采用位置差分法BDS测速,大偏差和小偏差交替变化幅度明显,大的偏差超过±3m/s;采用原始多普勒观测值测速法BDS测速,偏差主要在±0.8m/s范围。
对比方案1和方案2,采用位置差分法GPS测速在三个方向的偏差变化更小,优于BDS测速;对比方案3和方案4,采用原始多普勒观测值测速法GPS测速,偏差的稳定性优于BDS测速。
表1 速度差值的标准差(m/s)
|
|
X |
Y |
Z |
|
方案1 |
0.57 |
0.65 |
0.66 |
|
方案2 |
1.01 |
1.03 |
0.76 |
|
方案3 |
0.30 |
0.24 |
0.29 |
|
方案4 |
0.53 |
0.51 |
0.48 |
从表1的统计结果可以看出,原始多普勒观测值法的测速精度高于位置差分法的测速精度,其中GPS测速时,三个方向分别提高了0.27m/s、0.41m/s和0.37m/s。BDS测速时,三个方向分别提高了0.58m/s、0.52m/s和0.28m/s;GPS测速的精度优于BDS测速的精度,其中位置差分法,三个方向分别提高了0.54m/s、0.38m/s和0.10m/s。原始多普勒观测值法,三个方向分别提高了0.23m/s、0.27m/s和0.19m/s。
5 结论
采用原始多普勒观测值法BDS测速,其精度基本不受载体运动状态影响,优于位置差分法,是比较精确的方法。但由于目前BDS卫星的数目还不够多,其原始多普勒观测值的测速精度要低于GPS的测速精度,为0.5m/s的水平。
参考文献
[1] 杨元喜. 自适应动态导航定位[M].北京:测绘出版社,2006
[2]何海波,杨元喜,孙中苗.几种GPS测速方法的比较分析[J].测绘学报,2002,03:217-221.
[3]陈永奇. GPS相对定位中系统误差的影响[J]. 武汉测绘科技大学学报,1990,02:1-9.
[4]吴富梅,肖云.利用伪距差分法进行GPS测速[J].武汉大学学报(信息科学版),2010,09:1034-1038.
[5]刘季,张小红. GPS/BD组合导航定位试验和精度分析[J]. 测绘信息与工程,2012,04:1-3+36.
[6]陈远,于兴旺,叶聪云,张明.GPS多普勒观测值测速的精度分析[J].全球定位系统,2008,01:31-34+38.
[7]王拓,吕志伟,殷实,王贺.北斗多普勒测速精度的分析[J].测绘信息与工程,2012,02:16-19.
[8]单瑞,赵铁虎,于得水,杨源,李攀峰.单点GPS多普勒测速模型比较与精度分析[J].测绘通报,2013,03:7-9+17.

