 RSS订阅
RSS订阅1引言
多源遥感信息协同处理是指同时使用两种或两种以上不同类型的遥感数据源完成某一事件的过程,“可以起到1加1大于2的效果”(李小文,2007年)。主被动遥感数据协同处理主要体现在建立各类遥感机理模型及其地学描述中的尺度问题、参数提取理论与方法、提取结果的真实性检验等方面,解决的方法就是多源异构数据的同化,即同时利用所有不同时空尺度和不同来源的数据,估计待求参数的最合理值(序列值)。20世纪90年代中后期协同信息处.理逐渐成为计算机、生物模式识别等领域的研究热点,近几年来在理论基础和应用领域上更是取得了一些重大进展。但是,有关主被动遥感信息的提取及协同处理,尤其是煤矿区地表形变要素信息提取方面的研究进展则鲜有报道。
机载LiDAR点云数据能够提供高精度地表高程信息,而GeoEye高分辨率卫星影像可以提供高清晰度的地物纹理信息和丰富的光谱信息。因此,综合利用点云数据与高分辨率遥感影像,可以充分发挥两种不同遥感数据源的优势,弥补单一数据源的不足,有效提高地表覆盖物的提取精度,可更加准确地获得目标的某一特征或一组相关特征,使整个系统所获得的综合信息具有更高的精度与可靠性。本文选择河南鹤壁矿区作为实验研究区,研究面向对象分类的矿区地表覆盖信息协同处理方法,构建了基于支持向量机(SVM)的LiDAR与GeoEye协同处理模型,提出将高分辨图像的光谱信息和nDSM信息作为支持向量机分类模型的输入,利用nDSM高度阈值区分候选分割对象的方法,实现了建(构)筑物要素信息的协同提取;构建的基于决策树分类器的矿区典型地物协同处理模型,将图像光谱信息、DSM数据和地形参数等多源数据进行融合,建立了一个树型的多源数据协同处理推理模型,提取出矸石堆、煤堆等典型煤矿区地物及植被、道路、水体等典型地表覆被要素信息。
2.1 实验区概况
鹤壁市是在煤炭开采基础上发展起来的矿业城市,位于河南省北部,太行山东麓向华北平原过渡地带,矿区分布范围广,人口密度较大,地物要素的空间分布信息对于煤矿区地质环境监测非常重要。
研究选用的是2011年4月20日获取的机载LiDAR数据,GeoEye数据为2011年7月12日。实验区内地物类型较为复杂,主要包括农村居民地、工矿建筑、林地、农作物、堆煤场、矸石山和水系等。由于两种数据源获取的日期不同,因此对于不同类型植被的提取较为有利。
LiDAR点云数据和GeoEye影像预处理过程如下:
(1)将LiDAR数据生成DEM;根据实地采集数据并结合GPS和惯性测量系统观测数据,计算出每个点云的三维坐标,得到的数据精度:高程方向为±11cm,水平位置为±15cm。
(2)检测和剔除其中的系统误差和粗差点。对点云数据采用自适应TIN滤波方法进行滤波和分类,分离出地面和非地面点。
(3)基于Kriging插值方法建立DEM,同时利用LiDAR第一次返回数据建立DSM,从DSM中减去DEM即可得到地表物体的高程信息,该模型为nDSM(normalized Digital Surface Model)。实验研究所提取的nDSM空间分辨率为1m。
(4)使用DSM对GeoEye数据进行正射校正,使校正后的光学图像与LiDAR数据精确配准。
面向对象的图像分类方法需要首先对图像进行分割,获得均质、分离的目标对象,然后计算不同对象的光谱、形状等特征。本文采用通过控制异质性和尺度参数进行相邻区域合并获取分割对象的算法,其异质性和尺度参数由航空彩色图像和nDSM高程数据计算得到。
同质参数![]() 由颜色差异
由颜色差异![]() 和形状差异
和形状差异![]() 特征确定。颜色是指物体的光谱响应,而形状则传达了有关对象空间语义信息的一致性。它们之间的数学表达式为:
特征确定。颜色是指物体的光谱响应,而形状则传达了有关对象空间语义信息的一致性。它们之间的数学表达式为:
式(1)中:![]() 和
和![]() 为权重参数,可根据实际情况进行调整。形状特征进一步可划分为两个相互对立的特征:紧致度(Cmpct)和光滑度(Smooth)。研究中,形状和平滑参数的权重分别设置为0.3和0.5,尺度为15。
为权重参数,可根据实际情况进行调整。形状特征进一步可划分为两个相互对立的特征:紧致度(Cmpct)和光滑度(Smooth)。研究中,形状和平滑参数的权重分别设置为0.3和0.5,尺度为15。
协同处理方法在信息科学中的应用目前还很不成熟,因此本文从以下几个方面入手进行研究。
(2)对不变量的提取采用传统模式识别中的各种相似度量和特征提取方法,如支持向量机(SVM)、决策树等。
3.2 基于SVM的建(构)筑物协同提取算法模型
对LiDAR数据生成的nDSM与GeoEye高分辨率遥感影像进行协同处理,利用nDSM高度信息和遥感图像的光谱信息,并使用支持向量机方法对实验区的建(构)筑物等典型地物要素进行精确提取。
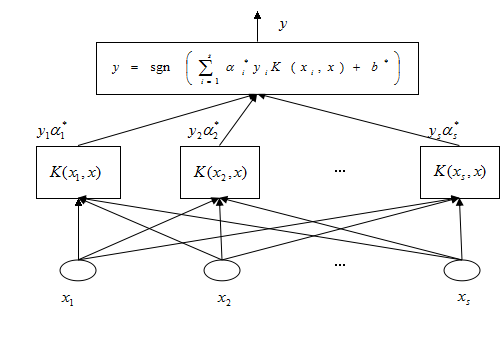
支持向量机(SVM)的通用判别函数为:
其中函数K称为核函数,根据采用不同的核函数,可以构造出不同的分类模型。如选用的核函数形式为多项式:![]() ,或为Sigmoid函数,则据此构造的支持向量机判别函数分别为:
,或为Sigmoid函数,则据此构造的支持向量机判别函数分别为:
![]() (3)
(3)
其中:s为支持矢量的个数;γ是核函数里的Gamma系数;d是多项式系数;![]() 为偏移值。
为偏移值。
SVM分类函数在形式上类似于一个神经网络,输出是S个中间节点的线性组合,每个中间节点对应一个支持向量,如图1所示。由于最终的判别函数只包含未知向量与支持向量内积的线性组合,因此识别时的计算复杂度取决于支持向量的个数。
(1)数据选取
|
|
|
|
|
|
R波段 |
G波段 |
B波段 |
nDSM图像 |




图2. GeoEye图像与nDSM图像
实验区内的建(构)筑物最高的在70m以上,高于40m的有8栋,20m到40m的有9栋,其余的都在20m以下,最低的仅为3m,甚至比旁边的树木还低。树木在建(构)筑物边界处显示为很多的小白点,这增加了分类提取的难度。将LiDAR数据处理成DSM和DEM,然后使用DSM减去DEM得到只有地物高度信息的数字地表模型nDSM(图2)。nDSM图像用灰度表示高程,图像越亮表示高程值越大。GeoEye影像有红(R)、绿(G)、蓝(B)三个波段,全色波段的分辨率为0.4m。
LiADR高程数据中建(构)筑物的边界不太清晰,这与初始点云密度较低有关。图像中颜色越亮表示建(构)筑物越高,GeoEye影像的纹理、光谱和形状信息比较丰富,反映出来的地物类别多样,如建(构)筑物、道路、草坪、树木等,部分建(构)筑物被高层建筑物的阴影遮挡。
(2)阈值设定
利用nDSM高度阈值区分出候选的分割对象,并对建(构)筑物进行提取和分类。通常阈值设置为较小的数值,以确保建筑物的完整性,如农村住宅一般较低,高度阈值设置为1m。
建筑物与其本影较难区别,容易出现错分。但由于阴影的亮度值很低,而房顶的亮度值通常较高,因此使用GeoEye影像的全色波段,并设置全色波段的阴影亮度阈值小于350,可以消除建筑物候选对象中的阴影。GeoEye影像可显示出更准确的地物边界,利用其光谱信息可以提高建筑物边缘的识别率,并将建筑物边缘坡度较大区域中与房顶光谱一致的对象分类到建筑物中。如果建筑物高度H沿x和y方向的偏导数均为已知,则地形坡度(Slope)计算公式为:
 (4)
(4)
地形坡度阈值通过试错的方法确定,并兼顾坡度图像与坡度直方图的分布情况,将其取值区间限定在[40°,90°]。针对相邻对象具有相似光谱特征,如不同建(构)筑物的屋顶具有不同的颜色,就必须对其在GeoEye影像各个波段的光谱进行对比分析。最简单的方法是利用某个对象的亮度值与邻近的“建筑物”对象进行关联分析,从而表征该亮度值与邻近对象的差异。随着定义关系特征的变化,可根据其相似性定义一定的搜索范围,即只对在一定距离内的对象进行分类,本文选择20个像素作为距离阈值。上述使用的光谱相似性是比较分割对象的平均绝对亮度的差异,亮度差异阈值设置为30个像素。
基于两种类型的形态学算子进一步处理“建筑物”对象的过程为:填充操作,用来填补“建筑物”对象中小于阈值的内孔。闭操作,以便有效地平滑粗糙的边界,并去除建筑物边缘的小缺口。本研究选取的结构元素为5×5的矩形,农村居民住宅和工矿建筑可通过nDSM高度阈值予以区分,这里nDSM高度阈值设置为6.5m。
(3)LiDAR点云数据与GeoEye影像协同提取方法
将高分辨率图像的光谱信息(R、G、B波段)和nDSM信息作为支持向量机分类模型的输入,协同提取建(构)筑物,便得到提取的原始结果(图3和图4)。对提取的原始结果进行小面积去除和数学形态学处理后得到的结果(图5)。
(4)提取结果分析

由图5可知,实验研究区内高层和中层建(构)筑物都能够比较完整的提取出来,只是部分存在提取边缘与原图像不吻合情况;低层建(构)筑物由于部分屋顶被树木和阴影遮挡,提取时出现破碎区域,边缘欠完整。
位置准确性方面。由于高层建(构)筑物在LiDAR和GeoEye原图像上有一定的错位,使得提取出来的边缘与原图像边缘出现了不吻合现象,尤其是图像上方的三栋高层建筑错位较为严重,从而影响了位置提取的准确性;图5中间的三排房屋顶部灰度比较均匀,边缘没有树木和阴影遮挡,GeoEye图像与LiDAR数据匹配的也较好,提取结果与原图像完全吻合;图像上部左侧的长条形建筑本身的高度较低,受阴影遮挡又较多,提取边缘在有阴影遮挡的部位出现了错位。
3.3 基于决策树的矿区典型地物协同处理模型
利用光学遥感图像的光谱信息、机载LiDAR的DSM数据及地形参数等多源数据融合,建立了一个树型的多源数据协同处理推理模型,自动提取与煤矿生产密切相关的堆状物体,如矸石堆、堆煤场等,以及开采沉陷区地表覆被要素如植被和农田、矿区内道路与空地、水体(包括尾矿湖)等煤矿区典型地物。
理论提取模型所需要的6种信息分别用F1、F2、F3、F4、F5、F6表示,其中F1定义为红、绿、蓝三个波段光谱信息的均值,即
![]() (5)
(5)
设高程信息为F2,Z为像元高度,n是物体的像元数,则物体的平均高度值为:
![]()
![]() (6)
(6)
据此设定物体的标准规划高程F3由下式计算:
 (7)
(7)
则相应的地形坡度倾斜信息、地面倾角为:
![]()
![]() (8)
(8)
地面的平均倾角F4及规划的地面倾斜角F5的表达式为:
![]()
 (9)
(9)
地形信息用F6表示。在上述6种信息确定的基础上,建立了推理模型。
煤矿区典型地物在LiDAR和GeoEye图像中的特征表现不同,如煤矸石堆、水体与尾矿湖等地物对光谱的吸收作用,使得LiDAR后向反射较弱,但在GeoEye近红外波段有一个明显的吸收带。本文采用NDWI水体指数和分割对象的DSM标准差(σ)用以提取水体和堆煤场。水体指数NDWI可由GeoEye的绿波段G和近红外波段Nir计算得到,即 ![]() 。
。
由于水体、堆煤场与矸石堆在NDWI图像中具有相似的特征,分类采用的具体解决方法是:首先利用NDWI水体指数提取出亮度暗的地物如水体和堆煤场;然后,根据构建DSM的标准差来区分这两类地物。水体对象与其他地物相比,通常具有较小的DSM标准差。标准差计算公式为:
![]() (10)
(10)
式中:![]() 是第m个分割对象的所有像元(n)DSM的标准差;Pm为分割对象m的像元集合;
是第m个分割对象的所有像元(n)DSM的标准差;Pm为分割对象m的像元集合;![]() 是像元
是像元![]() 的DSM值。本文将区分水体与堆煤场的DSM标准差阈值设定为0.26。矸石堆与堆煤场的光谱特征相似,但其占地面积和高程远大于堆煤场,据此可将两者区分开来。
的DSM值。本文将区分水体与堆煤场的DSM标准差阈值设定为0.26。矸石堆与堆煤场的光谱特征相似,但其占地面积和高程远大于堆煤场,据此可将两者区分开来。
(3)道路与空地的提取
由于道路和空地这两类目标在光谱信息和高度上都非常相似,仅仅依据光谱特征和LiDAR高程信息难以区分。因此,可根据对象形状特征的不同对两者加以区分。eCognition软件提供了形状指数—紧致度用于道路和空地的分类,其计算公式为:
![]()
![]() (11)
(11)
式中:comp表示紧致度;a、b分别为分割对象最小外接长方形的长和宽;n为对象内的像元数量。
(3)植被要素提取
用于植被提取的归一化植被指数NDVI,是由校正后的GeoEye多光谱图像计算得到,计算公式为:
![]() (12)
(12)
通过对直方图分析,将植被和非植被NDVI阈值设置为0.57。nDSM高度差异的信息可以用来区分植被乔木、灌木和农作物,因为在4月份乔木、灌木高度较高,而农作物较矮小。隶属函数是用来定义nDSM高度差,区分灌木和乔木的高度阈值分别设定为0.5m和1m。
遥感图像分类精度的评价方法通常是将分类图与标准数据(图件或地面实测值)进行比较,以正确分类的百分比来表示其精度。一般情况下无法检核整幅分类图的每个像元是否正确,而是选取有代表性的样本对分类误差进行估计。目前通常采用混淆矩阵来进行分类精度的评定,即以Kappa系数评价整个分类结果的精度,以条件Kappa系数评价单一类别的分类精度。混淆矩阵中,对角线上的元素为被正确分类的样本数目,非对角线上的元素为被混分的样本数目。应用混淆矩阵分析的主要参数有:
(1)总分类精度
![]() (13)
(13)
式中:![]() 为总分类精度;m为类别数;N为样本总数;
为总分类精度;m为类别数;N为样本总数;![]() 为第k类的判别样本数。
为第k类的判别样本数。
对检核分类精度的样区内的所有像元,统计其分类图中的类别与实际类别之间的混淆程度,并用表格的方式列出混淆矩阵。
(2)Kappa系数
Kappa系数计算公式为:
 (14)
(14)
式中:K表示Kappa系数;N为样本总数;![]() 为某一类所在列的总数;
为某一类所在列的总数;![]() 为某一类所在行的总数。
为某一类所在行的总数。
(3)各类别的条件Kappa系数
各类别的条件Kappa系数Ki计算式为:
在各参数中,总分类精度和Kappa系数反映整个图像的分类精度,条件Kappa系数![]() 则反映了各类别的分类精度。
则反映了各类别的分类精度。
对GeoEye影像的目视解译结果随机选取具有典型矿区特征的地物(地物提取结果如图6所示),作为分类结果的精度评价依据。表1为分类结果混淆矩阵及精度评价结果,其中提取的为水体、堆煤场、矸石堆、农村建筑物、工矿建筑、灌丛、农作物、树木、公路和空地,共十类典型地物。


图6矿区地表要素提取结果
表1 分类精度统计(单位:m2)
|
水 |
煤堆 |
居民 住宅 |
煤矿建筑 |
灌木 |
道路 |
空地 |
矸石堆 |
农作物草地 |
树木 | |
|
水 |
10141 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
煤堆 |
0 |
9755 |
0 |
0 |
0 |
706 |
0 |
0 |
0 |
0 |
|
居民住宅 |
0 |
0 |
13565 |
0 |
0 |
46 |
269 |
0 |
0 |
77 |
|
煤矿建筑 |
0 |
0 |
0 |
25542 |
0 |
7 |
0 |
0 |
0 |
0 |
|
灌木 |
2 |
41 |
62 |
1 |
3231 |
190 |
22 |
0 |
743 |
2617 |
|
道路 |
18 |
164 |
5 |
177 |
0 |
13760 |
1280 |
4 |
497 |
7 |
|
空地 |
2 |
244 |
187 |
359 |
67 |
276 |
2792 |
69 |
357 |
36 |
|
矸石堆 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
21535 |
0 |
0 |
|
农作物、草地 |
15 |
178 |
6 |
0 |
1416 |
298 |
366 |
0 |
44647 |
3717 |
|
树木 |
0 |
33 |
115 |
170 |
510 |
126 |
4 |
0 |
276 |
10154 |
|
Total |
10178 |
10415 |
13940 |
26249 |
5224 |
15409 |
4733 |
21608 |
46520 |
16608 |
|
User acc. (%) |
100 |
93.25 |
97.19 |
99.97 |
46.77 |
86.48 |
63.61 |
100 |
88.16 |
89.16 |
|
Prod. acc. (%) |
99.64 |
93.66 |
97.31 |
97.31 |
61.85 |
89.3 |
58.99 |
99.66 |
95.97 |
61.14 |
5 结论
本文利用LiDAR数据与GeoEye高分辨率遥感影像,基于面向对象分类方法对煤矿区构建(筑)物信息提取进行了研究,实验证明本研究取得的结果可为地理矿情监测提供借鉴。面向对象的分类方法能够较好地获取反映真实地表的理想分类结果,有效去除椒盐噪声的影响。主要结论如下:
(1)LiDAR高度信息能够有效解决建筑物光谱多样性问题,与GeoEye高分辨率多光谱遥感影像进行协同处理,能够提取更详细的地表覆盖类型,总体精度达90.78 %。
(2)分割对象的DSM标准差特征能够有效区分在GeoEye影像中具有相似光谱特征的沉陷坑水体、堆煤场和矸石堆等煤矿区典型地物。
参考文献
<!-(6)J.F.MAS. Monitoring land-cover changes: a comparison of change detection techniques. Int. J. of RS, 1999, 20(1):139-152
<!-(7)Marsh S.H., Cotton C., Ager G.etal.Detecting Mine pollution using hyperspectral data in temperate.vegetated european environments-14th Geologic Remote Sensing Conference, Las Vegas, 6-8 November,2000
-->(8)A. Prakash and R.P.Gupta.Land use mapping change detection in coal mining area-a case study in the Tharia, Coalfield, India. Int.J. of RS,1998.19(3):391-410
-->(9)Zhu C Q,Shi W Z,Pesarasi M, et a1.The Recognition of Road Network from High resolution Satellite Remotely Sensed Data Using Image Morphological Characteristics [J].International Journal of Remote Sensing, 2006, 26(24):5493-5508
<!-(10)XIONG Zhen, TONG Qing Xi, ZHENG Lan Fen.High-rank artificial neural network algorithm for classification of hyperspectral image data.Journal of Image and Graphics, 2000,(3):196-201
<!-(11)H. Haken.Information Compression in Biological Systems.Biol. Cybern,1987
-->(12)H. Haken. Advanced Synergetics. Berlin:Springer,1987
-->(13)G. Herrera, R.Toma´s, F.Vicente, et al. Mapping ground movements in open pit mining areas using differential SAR interferometry[J]. International Journal of Rock Mechanics & Mining Sciences 47, (2010):1114–1125
(14)Definiens AG. Definiens eCognition Developer 8 Reference Book. www. definiens.com.2009
(15)Lu Xiaoping,Ge Xiaosan.Automatic coal mine disaster monitoring system based spatial information service.2010 International Conference on Computer and Communication Technologies in Agriculture Engineering, Volume 3:356-359
(16)卢小平,马剑,卢遥等.多源遥感数据融合在矿区土地覆盖分类中的应用[J].河南理工大学学报.自然科学版,2010,29(3):56-60
(17)李怡静,胡翔云,张剑清等.影像与LiDAR数据信息融合复杂场景下的道路提取[J].测绘学报,2012(6):870-876
(18)李广水,宋丁全,郑滔等.协同训练支持向量机对遥感影像的分类研究[J].计算机工程与应用,2009,45(29):160-163
(19)姜毅,乐庆玲.基于决策树的协同进化分类算法研究[J].电脑知识与技术,2007(13):197-198
(20)卢小平,王双亭.遥感原理与方法[M].北京:测绘出版社,2012

