 RSS����
RSS�����зֱ��ʳ��������(Moderate Resolution Imaging Spectroradiometer, MODIS)��EOSϵͳ����Ҫ������֮һ�������нϸߵĿռ䡢����ʱ��ֱ���[1]��Ӧ��ǰ����������MODISӰ�����߿ռ�ֱ���Ϊ250m�������Ԫ�㷺���ڡ������Ԫ������ң�����ij���ԭ�������µ�ң��Ӱ���ϵ�һ�ֱ�Ȼ����[2]�������Ԫ�Ĵ����Ǵ�ͳ��Ԫ��ң�з������������������Դﵽʹ��Ҫ�����Ҫԭ��[3]����Ի����Ԫ���⣬ѧ��������˹��ֽ�ģ�ͣ�ͨ��ѡȡǡ���ĵر�����������ϣ�������һ���̶���������ս���ľ���[4]�������Ԫ�ֽ������������Ҫ���ݣ�(1)��ȡ��Ԫ���ͼ����������ֵ��(2)��ȡ����Ԫ�ڰ����Ķ�Ԫ���ͼ����ȣ�����Ԫ����Ԫ����ռ������ٷֱȡ�ѡȡ���ʵĶ�Ԫ�dzɹ����л����Ԫ�ֽ�Ĺؼ�[5][6]��
��Ԫѡȡ����ȷ����Ԫ�����Լ���Ԫ����ֵ�����д�ң��Ӱ���л�ȡ��Ԫ�ķ����У������Ե��㷨����Ԫ����ָ��PPI�㷨[7]��N-FINDR�㷨[8][9][10]���������Ƕ�SMACC[11]������ɷַ���VCA[12][[13]�����������㷨SGA[14]�������ӿռ�ͶӰ�㷨OSP[15]������ͶӰ�㷨SPA[16]����С����任MVT[17]�������㷨CCA[18]������������IEA[19][20]�ȡ�����PPI�㷨����ɹ��ķ���֮һ����ͨ��������ԪͶӰ��������������ϣ���ȡͶӰ�߶ζ˵����Ԫ��Ϊ��Ԫ���������о��߶�����PPI�������ж�Ԫ��ȡ���˹㷺�о�����Uttam Kumar et al[21]��Singh,et al[22]��Kaiwen Zhong[23]��֣�зɵ�[24]��������[25]���Ỷ��[26]����ϼ��[27]��PPI�㷨�������ɷֱ任(PCA)����С�����任(MNF)��ά֮����еģ�Boardman��[7]ָ������ά���ܻᡰ���ӡ�һЩСĿ�꣬��ʱ����ЩСĿ������������Ҫ�ġ������MODIS���ݿ���500m�ֱ��ʲ��ν���7�����Σ���ά��ɿ��ò�����Ϣ���٣�ͬʱʹ�㷨����ƫ�����ά������������ӻ�ʹ��Ԫ��ȡ��������һ���棬��ˮɭ[28]ָ����PPI�㷨����ȡ����Ԫʱ�Զ�Ԫѡ����ڲ�ȷ���ԣ������ɴ˵�������ȡ�����Ԫ���Ƚ��ͣ����ͬ�����й���ƫ��������ͬ�������͵IJ�ͬ���࣬������ͬ��Ԫ�Դ���ʹ��ȡ����ʵ�����Ԫ�����١����ֲ�ȷ���Խ��Ӵ�ͼ����ڶ�Ԫ�ĺ���Ӧ�ô�������
Ϊ�˳������MODIS�߸����ε�Ӱ��������ͬʱ����������PPI�㷨�����Ӱ�죬��Ч��ȡ������Ŀ�Ķ�Ԫ���ף��������һ�ֻ���MODISӰ��ĸĽ���PPI��Ԫ��ȡ�㷨�����㷨����ǰ����Ӱ����н�ά���������Ƕ���ȡ���ı�ѡ��Ԫ���ù��ǵĸ���ȥ��������Ԫ��ͬʱ���ù��Ƕ�ͬ�ֵ������͵�������б�ǣ������ͬ���Ԫ���ظ���ȡ���������ս��Ľ��㷨����MODISӰ��Ķ�Ԫ��ȡ�У�����������ȡ���Ķ�Ԫ���л����Ԫ�ֽ�ĵ�����ͼ�ľ��Ƚ��������ۡ�
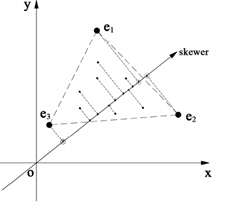
��Ԫ����ָ��(Pixel Purity Index, PPI)[7]�㷨��Ϊͼ�����ݼ���Nά�ռ����γ�һ����������������Nά�ռ��е�ʸ��������ͨ����С�����任��MNF�������ݽ��н�ά���������ɴ����������ݼ����ڲ����������������Ȼ����ֱ�����������������ͶӰ��ͶӰ�����һ��ȷ������ѡ������������ϵļ�ֵ�㡣������������IJ��ϱ仯����¼��ͼ����ÿ��������Ϊ��ֵ��Ĵ���������϶�����Ƶ����ߵĵ����Ҫ�ҵĴ��㡣��ͼ1��ʾ��һ�����������ϣ���Ԫe3��e2��ͶӰΪ����ͼ�Сֵ����������Ԫ����Ϊ��ѡ��Ԫ�����ǡ�
PPI�㷨������ȱ��[7]��
��PPI�㷨���ǵ����㷨������ÿ�ε�ͶӰ��������������ɵģ���ȡ��Ԫ��ȷ������֤���п��ܳ���ͬ����ͼ��������PPI�㷨���õ��Ķ�Ԫȴ��ͬ����ͬ�������Ԫ������ͬ��Ԫ��ȡ�����������
��PPI�㷨��ͼ�����������У���˱���Ҫ��MNF�任ȥ�����������ʹ�ã����ǽ�ά����ʧ��Ϣ����
��ʹ��MNF�任�����ݽ��н�άʱ����ά���ά�ȺͲ��ε���ѡû�к��ʵĹ���
����Ԫ���������ѭ��������ȫ���û�����ָ����û�к��ʵĹ���
�������ȱ���е��������������������һ�ָĽ���PPI��Ԫ��ȡ�㷨�����㷨����Ӱ����н�ά���������ù�����������ͬ����������Ԫ��ѡ�룬ͬʱ�ų�������Ԫ��Ӱ�졣
����[29](Spectral Angle, SA)��ָ����ͬ��������Χ���������������ڹ��ռ������γɵļнǡ����Ļ���ԭ���ǣ��ѹ�����Ϊʸ��ͶӰ��Nά�ռ��ϣ�����N��ѡȡ�IJ���������Nά�ռ��У����������߱������з����г��ȵ�ʸ����������֮���γɵļнǽ������ǡ�ͼ2Ϊ��ά�ռ�Ĺ���ʸ�����ǵ�������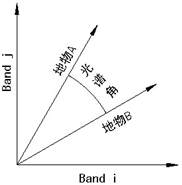
��Nά�ռ䣬���ǵ���ѧ����Ϊ������![]()
![]()
![]() ��
��![]()
![]()
![]() ���������������źţ�SAͨ���ȽϹ�������
���������������źţ�SAͨ���ȽϹ�������![]() ��
��![]()
![]()
![]() �ĽǶ��������������ԡ�����
�ĽǶ��������������ԡ�����
���ǵı仯��Χ��![]()
![]()
![]() ��ͬ����Ԫ֮��Ĺ��Ǻ�С���ӽ���0�����������ֵ�ϴӽ���1������ͬ����Ԫ֮��Ĺ�����Ƚϴ���Ӧ��������ֵ�ӽ���0�����ǿ��ǵ��ǹ���ʸ���ķ�������ǹ���ʸ���ij��ȣ��ڼ���Ӱ�����ʱ�������ǹ���ʸ���ķ�������ù�עӰ���������ȣ�����ͬ�����й���ƫ��ĵ���ᱻ����ϸߵ������ԡ������ں�����Ԫ���������Է���������Ե���Խ�ԣ�����Ϊ�������Ĺ�����ͼģ��(SAM)�ڸ߹���ң��Ӱ����ࡢ���ࡢ������Ϣ��ȡ�ȷ��涼�õ��˹㷺Ӧ�á�
��ͬ����Ԫ֮��Ĺ��Ǻ�С���ӽ���0�����������ֵ�ϴӽ���1������ͬ����Ԫ֮��Ĺ�����Ƚϴ���Ӧ��������ֵ�ӽ���0�����ǿ��ǵ��ǹ���ʸ���ķ�������ǹ���ʸ���ij��ȣ��ڼ���Ӱ�����ʱ�������ǹ���ʸ���ķ�������ù�עӰ���������ȣ�����ͬ�����й���ƫ��ĵ���ᱻ����ϸߵ������ԡ������ں�����Ԫ���������Է���������Ե���Խ�ԣ�����Ϊ�������Ĺ�����ͼģ��(SAM)�ڸ߹���ң��Ӱ����ࡢ���ࡢ������Ϣ��ȡ�ȷ��涼�õ��˹㷺Ӧ�á�
ԭʼPPI�㷨��Ӱ�����ݽ�ά����ȡ��Ԫ�����²��ܳ������Ӱ��Ĺ�����Ϣ����һ����PPI�㷨���ͬ�����й��ײ������Ԫ��Ϊ��ͬ��Ԫ����ȡ��Ϊ�˳������MODIS����7�����εĹ�����Ϣ��ͬʱ����ͬ���Ԫ���ظ���ȡ���������һ�ָĽ���PPI�㷨����Imp_PPI�����ԭʼPPI�㷨���ڵ����⣬Imp_PPI�㷨�����ĸĽ������㣬�ֱ�Ϊ��
�Ľ�һ����ԭʼPPI�㷨��ȡ����N����Ԫ�����ij�����ѡ��Ԫ��������������ǣ������������������ֵ![]() �Ƚϴ�С�����ڹ���С��
�Ƚϴ�С�����ڹ���С��![]() ��������ѡ��Ԫ����Ϊ��������ͬ�ֵ���������е�һ��˳
��������ѡ��Ԫ����Ϊ��������ͬ�ֵ���������е�һ��˳
���ú���ϴ�PPI����Ԫ����������㷨������ͼ3�к����ʾ����һ�Ľ��������PPI�㷨ȱ���е����������ܹ���Ч�ĺ�����Ԫ���������ԣ�����ѡ��Ԫ��ͬ�ֵ������͵���Ԫ��
�Ľ��������ڱ��ĵ��㷨����ȡ��Ԫǰû�н���ȥ�봦���������Ԫ����������Ӱ�죬Ϊ�˱�������Ԫ�к����������ף����ĵĵڶ����Ľ�Ϊ����ÿ������ͬ����Ԫ�ı�ѡ��Ԫ������Ϊ���Ŀ�һ��W*W�Ĵ��ڣ����㴰���и�������Ԫ��������Ԫ�Ĺ��ǣ����������ֵ![]() �Ƚϴ�С��ͳ��С��
�Ƚϴ�С��ͳ��С��![]() �Ĺ��Ǹ������������������ֵX��Ƚϣ���С��
�Ĺ��Ǹ������������������ֵX��Ƚϣ���С��![]() �Ĺ��Ǹ�������X����˵����������Ԫ���������еĴ������Ԫ�������ƣ�����ң��ͼ���Ϲ���ֵ�������ԣ����жϸ�������Ԫ������������������Ϊ���ն�Ԫ�������һ�Ľ����PPI�㷨ȱ���е���������������������MODIS���ݣ�500m�ֱ��ʵ�7�����ξ���MNF�任��������صĹ�����Ϣ��ʧ��Ӱ�쵽��������Ӱ���ϵĹ���������ʹ���㴿��Ԫָ��PPI�Ľ���ܵ�Ӱ�죬���յ�����ȡ����Ԫ����ƫ�Imp_PPI�㷨�ľ�������ͼ��ͼ3��ʾ��
�Ĺ��Ǹ�������X����˵����������Ԫ���������еĴ������Ԫ�������ƣ�����ң��ͼ���Ϲ���ֵ�������ԣ����жϸ�������Ԫ������������������Ϊ���ն�Ԫ�������һ�Ľ����PPI�㷨ȱ���е���������������������MODIS���ݣ�500m�ֱ��ʵ�7�����ξ���MNF�任��������صĹ�����Ϣ��ʧ��Ӱ�쵽��������Ӱ���ϵĹ���������ʹ���㴿��Ԫָ��PPI�Ľ���ܵ�Ӱ�죬���յ�����ȡ����Ԫ����ƫ�Imp_PPI�㷨�ľ�������ͼ��ͼ3��ʾ��
5 ʵ����������
����ԭʼPPI�ͱ��������Imp_PPI�㷨��������matlab R2010a�£���MODIS���������������㷨��ȡ��Ԫ���ͻ����Ԫ�ֽ��Ч�������������㷨��ȡ�˸�����Ŀ�Ķ�Ԫ���ף���ʵ���˻����Ԫ�ֽ⡣����������������У�������PPI��Imp_PPI�㷨��ȡ����Ԫ���ף�Ȼ���ٻ���������ģ��������Ԫ��ռ�ı�����
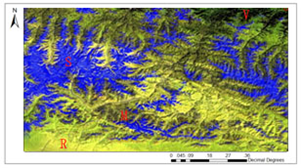
����ѡ�����о���λ�ڶ���84��50'~86��09'����γ43��07'~43��50'������1400~5218 m֮�����ɽ�жΡ�ʵ�����õ�MODIS L1B���ݻ�ȡ��2007��5��15�ա���ʱ��Ӱ������Ҫ�ĵ��������л�ѩ��ֲ������ʯ�ȡ����ݾ���ȥ������ȥbow-tie������У���ͷ��䶨���Ԥ����֮�õ������о����ķ�����Ӱ��Ϊ���������ֶ�Ԫ��ȡ�㷨���ڻ����Ԫ�ֽ����ľ��ȣ�������30m�ֱ��ʵ�TMӰ����Ϊ�ο�����ֵ�����Էֽ������ж������ۡ���ȡ��ͬһʱ�ڵ�Landsat 5 TM������Դ���������ʵ����USGS��Geological Survey of the United States���������䶨�ꡢƴ�ӺͲü���������MODIS����ͬһ����ϵ�µ��о�����1��7���η�����Ӱ��ͼ4(a)��TMӰ��7,5,1���ε�RGB�ϳ�ͼ��ͼ�϶���Ҫ�ĵ������ͽ����˱�ʾ��ͼ��S��ʾ��ѩ��V����ֲ����R��������M������Ӱ��
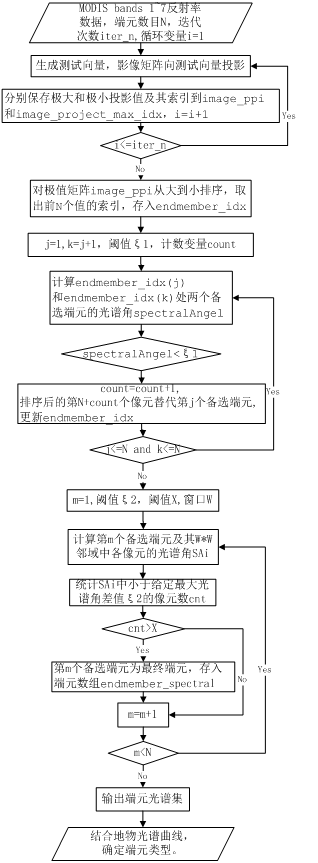
ͼ3 Imp_PPI�㷨����ͼ
(a) (b)
(c) (d)
ͼ4 �о������︲��ͼ
5.1 ��Ԫ��ȡ���������
ͨ��ͼ4(a)��Ŀ�ӽ�������ָ��Ӱ������ȡ�Ķ�Ԫ��ĿN=4���ֱ�Ϊ��ѩ��ֲ������ʯ����Ӱ������ͨ����������Լ���MODISӰ�����ֵ�÷�����ָ��Imp_PPI�㷨�и���ֵ�ֱ�Ϊ����������iter_n=5000��������ֵ![]()
![]()
![]() =10�㣻������ֵ
=10�㣻������ֵ![]()
![]()
![]() =20�㣻X=10������W=5�������ϸ�ֵ����PPI��Imp_PPI�㷨�У��õ�4����Ԫ�Ĺ���ֵ�������ݵ���������ߣ�ȷ��ÿ����Ԫ�������ĵ�����𣬵õ�ͼ5(a)(b)��ʾ�Ķ�Ԫ�������ߡ�
=20�㣻X=10������W=5�������ϸ�ֵ����PPI��Imp_PPI�㷨�У��õ�4����Ԫ�Ĺ���ֵ�������ݵ���������ߣ�ȷ��ÿ����Ԫ�������ĵ�����𣬵õ�ͼ5(a)(b)��ʾ�Ķ�Ԫ�������ߡ�
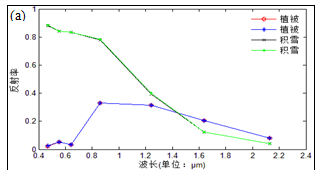
(a)��Ԫ��ĿN=4ʱ��PPI�㷨��ȡ��Ԫ����
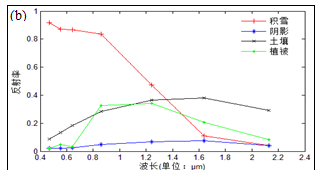
(b)��Ԫ��ĿN=4ʱ��Imp_PPI�㷨��ȡ��Ԫ����
ͼ5 Imp_PPI��PPI�㷨��ȡ���ĸ���Ԫ��������
��ͼ5(a)��֪��PPI�㷨��ȡ����4����Ԫ�У�ÿ��������ͬ�����ͣ����ǵĹ���ֵ��ÿ���������в��죬PPI�㷨ȴ������Ϊ���ֵ����Ԫ��ȡ��������Imp_PPI�㷨�ܹ���Чʶ�����ƶ�Ԫ����ͬ�ֵ������͵Ķ�Ԫ���Ӷ���ȡ��������Ŀ�Ķ�Ԫ���ף���ͼ5(b)��ʾ��
Ϊ������PPI�㷨��ȡ��MODISӰ���ϸ�����Ĺ��ף����Ľ��㷨�Ķ�Ԫ��ĿN����Ϊ8�����¼��㣬�㷨���������1��ʾ��8����Ԫ���ס�
��1 PPI�㷨��ȡ��8����Ԫ����ֵ
|
������ |
��Ԫ1 |
��Ԫ2 |
��Ԫ3 |
��Ԫ4 |
��Ԫ5 |
��Ԫ6 |
��Ԫ7 |
��Ԫ8 |
|
|
0.0343 |
0.0343 |
0.4463 |
0.8327 |
0.8327 |
0.0348 |
0.6657 |
0.7712 |
|
Band2 |
0.3295 |
0.3295 |
0.4097 |
0.7781 |
0.7823 |
0.3210 |
0.6232 |
0.7152 |
|
Band3 |
0.0226 |
0.0254 |
0.4905 |
0.8816 |
0.8843 |
0.0326 |
0.7114 |
0.7704 |
|
Band4 |
0.0508 |
0.0535 |
0.4594 |
0.8407 |
0.8407 |
0.0544 |
0.6688 |
0.7648 |
|
Band5 |
0.3146 |
0.3146 |
0.1908 |
0.3926 |
0.4014 |
0.3493 |
0.3489 |
0.2695 |
|
Band6 |
0.2053 |
0.2053 |
0.0434 |
0.1241 |
0.1241 |
0.2051 |
0.0919 |
0.0593 |
|
Band7 |
0.0814 |
0.0814 |
0.0393 |
0.0393 |
0.0393 |
0.0813 |
0.0394 |
0.0392 |
��ϵ���������߷�����1��֪����PPI�㷨��ȡ����8����Ԫ�У���Ԫ1��2��6��ֲ������Ԫ4��5�ǻ�ѩ����Ԫ3��7��8�ǻ�ѩ�����࣬��û����ȡ����������Ӱ��Ԫ���������Ӷ�Ԫ��ĿN=20�������ܱ���ȡ������ͬʱ��ѩ��ֲ�����������ֵ�������౻��ȡ�����������Բ�����ȡ����Ӱ��Ԫ��
�ۺϷ���ͼ5����1�������������ַ�����ȡ��Ԫ�Ĺ��̿�֪����ͳPPI�㷨����ȡ��Ԫ����ʱ�����õ�MNF�任��ȥ��������ͬʱ����ɵ���Ϣ��ʧ�ᵼ��ijЩ��Ԫ������Ч��ʶ���籾��ʵ���е���Ӱ��Ԫ��������Ӱ��MODISӰ��������Ͼ�����Ϊ�ϰ�����������MNF�任���Ӱ���ϲ�ռ����Ҫ������������ͨ�����㴿����Ԫָ����ȡ������һ���棬��ͳPPI��������ȱ�ٶ�ͬ�����Ͳ�ͬ������Ԫ�������̣��ᵼ����ȡ���ĸ�����Ŀ�Ķ�Ԫ�а����ĵ���������Ŀ���ٶ�������Ŀ���࣬���1�еĶ�Ԫ1��2��6����Ԫ3��4��5��7��8���Ľ�����㷨Imp_PPIͨ��ʡ�Դ�ͳ�㷨��ǰ�ڵ�MNF�任������Ӱ��Ĺ����������Ӷ�������ò�ͬ��Ԫ��Ӱ���ϵ����Խ�����ȡ������ͨ��������ǵķ���������������Ԫ��ͬ�ֵ��ﲻͬ���౻ѡ�����ն�Ԫ���ܹ���Ч����ȡ����������Ҫ����ȷ�Ķ�Ԫ����.
5.2 �����Ԫ�ֽ⼰�������
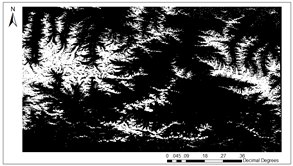
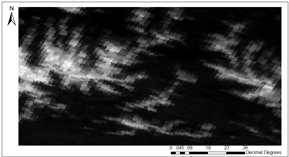
�����������ַ�����ȡ���Ķ�Ԫ����ֵ�����������Ի����Ԫ�ֽ�ģ�Ͷ�MODISӰ����л����Ԫ�ֽ⣬�õ�������ķ��ͼ����������������[24]�������������������㷨��ȡ�Ķ�Ԫ�����Ĵ�TMӰ����ѡȡѵ�����������������Ȼ���෨�����Ŀ�ӽ���õ������Ԫ��Ӧ�ķ�����ͼ�������о���Ӱ���ϻ�ѩΪ��Ҫ������Ҳ�ͬ����������ȷ���ԭ����ͬ�����Ա����Ի�ѩ����ͼΪ����չ������������������ͼ4(b)(c)(d)��ʾ�����У�ͼ4(b)��TMӰ��Ļ�ѩ����ͼ��ͼ4(c)����PPI�㷨�����Ϊ��Ԫ���Ļ����Ԫ�ֽ��ѩ���ͼ��ͼ4(d)����Imp_PPI�㷨�����Ϊ��Ԫ���Ļ����Ԫ�ֽ��ѩ���ͼ��
��ͼ4(c)��(d)��֪�����Ի��ģ������Ч�ķֽ��϶�Ԫ���õ����︲�ǵķ��ͼ��Ϊ�˶����������ֶ�Ԫ��ȡ�������õ��ĵ�����ͼ�ľ��ȣ����о���������������Ϊָ�������л����Ԫ�������ľ������ۣ���ͨ�������Ƚ���ȷ����Ԫ�ķ��ྫ�ȡ�
�����������˵����ijһ�������������![]()
![]()
![]() �ļ��㹫ʽΪ[30]��
�ļ��㹫ʽΪ[30]��
![]()
![]()
![]() (2)
(2)
����![]()
![]()
![]() ΪMODISӰ���ϵ�i��������j�����͵ı�����
ΪMODISӰ���ϵ�i��������j�����͵ı�����![]()
![]()
![]() ΪTMӰ���ϵ�i��������j�����͵ı�����������Ԫ�ֽ����õ�����Ԫ����ֵ�������ģ����������߶ȵ�������С���㹫ʽ�����Ӱ�����徫����������Ҫ��������nΪ��
ΪTMӰ���ϵ�i��������j�����͵ı�����������Ԫ�ֽ����õ�����Ԫ����ֵ�������ģ����������߶ȵ�������С���㹫ʽ�����Ӱ�����徫����������Ҫ��������nΪ��
![]() (3)
(3)
![]() ʽ�У�SΪ��̽�������ı��
ʽ�У�SΪ��̽�������ı��![]()
![]()
![]() Ϊ��̽����������ֵ�ľ�ֵ��
Ϊ��̽����������ֵ�ľ�ֵ��![]() Ϊ��̽�������ı���ϵ����ZΪ��Ӧ����ˮƽ������̬�ֲ�Zֵ�ĸ��ʱ����������ֵ��DΪ���������Χ�����������n/N<0.05��NΪ�о�����Ԫ����������ȡn�������n����������ȡ����ֵ
Ϊ��̽�������ı���ϵ����ZΪ��Ӧ����ˮƽ������̬�ֲ�Zֵ�ĸ��ʱ����������ֵ��DΪ���������Χ�����������n/N<0.05��NΪ�о�����Ԫ����������ȡn�������n����������ȡ����ֵ![]() ��
��
���ó����ķ�����ֱ����MODIS������ͼ�Ͻ�������������ڶԳ�����Ԫ���м���ʱ��Ϊ�˱�������������������ļ��������о���MODIS��ѩ���ͼ�г�ȡ10��6��6����Ԫ����Ϊ��̽�����������ȡ��ͬλ�õ�TM��ѩ����ͼ43��43��Ԫ�����з��ྫ�ȹ��㣬�õ������ͼ����������ֵ![]()
![]()
![]() ����ͳ����������ֵ�ľ�ֵ
����ͳ����������ֵ�ľ�ֵ![]()
![]()
![]() ��S������2��ʾ��
��S������2��ʾ��
![]() ��2 ��ͼ5��Ϊ��Ԫ���Ļ����Ԫ�ֽ��ѩ���ͼ��10�������������ȼ����ֵ�ͱ���
��2 ��ͼ5��Ϊ��Ԫ���Ļ����Ԫ�ֽ��ѩ���ͼ��10�������������ȼ����ֵ�ͱ���
|
|
||||||||||||
|
|
||||||||||||

ͨ����2���������ȿ�֪���ڷֽⷽ����ͬ������£�Imp_PPI��Ԫ��ȡ�����õ��Ļ�ѩ���ͼ�ϵ��������Ⱦ�ֵ����PPI������ʮ��������ƽ�����������Լ2.7%��
��ȡ����ˮƽΪ95%ʱ��Z=1.96��ȡ���������Χd��2.5%����(3)ʽ����ɵã����о�����ɸ���Ԫ��ȡ��������������������������������ֱ�Ϊ��![]()
![]()
![]() ����nPPI =102��nImp_PPI=96��
����nPPI =102��nImp_PPI=96��
��MODIS��ѩ���ͼ���ԣ��о�������Ԫ��ΪN=42823����n/N=0.0024��0.0022��������n/N<0.05��Ҫ���ڻ�ѩ���ͼ������102��96���������Ĺ������ϴ��IJ��ü��Է������ٷֱ�ѡȡ90�������㣬������ֲ��������ȡ������������ѩ���ͼ��ƽ����������ֵ����������ֵ��ķ��������ȶ�������ɵã����ֶ�Ԫ��ȡ�����ķֽ⾫�ȷֱ�Ϊ��QPPI=77.08%��QImp_PPI=79.27%��
ͨ�����϶Էֽ������ȵ�������֪�����øĽ����PPI�㷨Imp_PPI��ȡ���Ķ�Ԫ�����л����Ԫ�ֽ⣬�õ��ĵ�����ͼ�ľ��ȸ��ڴ�ͳPPI�㷨�ķֽ��������徫�������2.19%�������Imp_PPI��ȡ�Ķ�Ԫ�ĸ�������ֵ��Ӱ��ĵ������ͺ��������ķ��϶ȸ���ԭʼPPI�㷨���Ӷ���������Щ��Ԫ�����л����Ԫ�ֽ�ʱ���ܸ���ȷ��ʵ����Ԫ���Ľ�졣��һ���棬ͨ���Բ�ͬλ�����������ȵķ�����֪���ڴ�Ƭ�����ڲ������ַ������ȶ��ϸߣ�Imp_PPI�ֽ⾫�ȸ��Ʋ����ԣ�������2������8��������Ϊ��Ӱ���д�Ƭ�����ڲ���������Ԫ���٣���Ҫ�Ǵ�����Ԫ����������Թ���ģ��ʱ������Щ��Ԫ���������ֽ������Ϊ��Ԫ������Ӱ����١����ڲ�ͬ����ı߽紦�����ַ����о���������ڵ����ڲ�����Imp_PPI�����ֽ⾫����������ߣ�������1,3,4,5,6,7,9��10����Ҫԭ���ǻ����Ԫ��Ҫ�����ڲ�ͬ����ı߽紦����Ԫ�����Լ����͵IJ��춼��Ӱ�쵽���Էֽ�ģ�͵ķֽ�����ԭʼPPI�㷨������Ч��ʶ����Ӱ��Ԫ��ģ�ͶԸ������Ԫ�ķֽ�û�п�����Ӱ�Ļ��Ч���������Ӱ�������������͵ķֽ⾫�ȡ�
������ԣ��Ľ����PPI�����ܹ���Ч����MODISӰ��IJ�����Ϣ����Ч��ȡ��Ԫ���ף����øĽ����PPI������ȡ���Ķ�Ԫ�����л����Ԫ�ֽ⣬�õ��ĵ�����ͼ�ľ��ȸ�����ԭʼPPI������ȡ�Ķ�Ԫ�����зֽ�Ľ�����ܹ��ṩ��ȷ�ĵر��������͡�
6 ����
�������MODIS���ݵIJ����������Դ�ͳPPI�㷨�����˸Ľ����ֲ��˴�ͳPPI�㷨��Ҫ�����ݽ��н�ά��������Ӱ����Ϣ��ʧ���Լ���ͬ���Ԫ�������ظ���ȡ��ȱ�㣬�ܹ�����ԭʼӰ����Ϣ����ȡ��Ԫ���ף�������Ч�ı���������Ԫ��Ӱ�죬Ҳ�ܱ��⽫ͬ�������Ԫ������ͬ��Ԫ��ȡ�������������øĽ����PPI��Ԫ��ȡ������������Թ��ֽ�ģ�ͣ���MODISӰ����������Թ���죬�����������Ƚ����˾��ȹ��ƣ�ʵ��Ľ���������⡣
�����
[1] ���Ƹ�,����.��AVHRR��MODIS��ѩ����ͼ�о���չ[J].�����������Ϣ��ѧ,2005,21.
[2] ��ï��,������.ң��Ӱ������Ԫ�ֽ⼰���ֱ����ؽ��о���չ[J].������ѧ��չ,2010,29(6):747-759.
[3] ��Ӣʱ.ң��Ӧ�÷���ԭ���뷽��[M].����:��ѧ������.2003:328.
[4] �����,���ϼ,��.����������ѩͼ�������ѩ���ģ�͵��о�[J].��������,2004,26(2):160-165.
[5] Tompkins S., Mustard J.F., et al.. Optimization of endmembers for spectral mixture analysis[J]. Remote Sensing of Environment, 1997.59(3): 472-489.
[6] Elmore A.J., Mustard J.F., et al.. Quantifying vegetation change in semiarid environments: Precision and accuracy of spectral mixture analysis and the Normalized Difference Vegetation Index[J]. Remote Sensing of Environment, 2000. 73(1): 87-102.
[7] Boardman J W, Kruse F A et al.. Mapping target signatures via partial unmixing of AVIRIS data: in Summaries[C]. Fifth JPL Airborne Earth Science Workshop. Pasadena: JPL Publication:23�C26,1995.
[8] Winter M E. N-FINDR: an algorithm for fast autonomous spectral end-member determination in hyperspectral data[C]. Imaging Spectrometry V, SPIE Proceedings. Denver CO, USA, 3753: 266�C275,1999a.
[9] Winter M E. Fast autonomous spectral endmember determination In hyperspectral data[C]. Proceedings of the Thirteenth International Conference on Applied Geologic Remote Sensing. Vancouver, B C, Canada: 337�C344,1999b.
[10] Winter M E. A proof of the N-FINDR algorithm for the automated detection of end-members in a hysperspectral image Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery X[C], SPIE Proceedings. Orlando, USA: 12�C15. 2004.
[11] Gruninger J H, Ratkowski A J, et al.. The sequential maximum angle convex cone (SMACC) endmember model. Algorithms for Multispectral, Hyperspectral and Ultraspectral Imagery X[C], SPIE Proceedings. Orlando, USA, 5425: 1�C14. 2004.
[12] Nascimento J M P and Dias J M B. Vertex component analysis: a fast algorithm to unmix hyperspectral data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005. 43(4):898�C910.
[13] Nascimento J M P. Supervised Hyperspectral Unmixing. Lisboa: Universidade T��cnico de Lisboa: 2006.47�C72.
[14] Chang C I, Wu C C, et la.. A new growing method for simplex-based endmember extraction algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006.44(10): 2804�C2819.
[15] Harsanyi J C, Chang C I. Hyperspectral image classification and dimensionality reduction: an orthogonal subspace projection approach [J]. IEEE Transactions on Geoscience and Remote Sensing, 1994.32(4): 779�C785.
[16] Zhang J K, Rivard B, et al.. The successive projection algorithm (SPA), an algorithm with a spatial constraint for the automatic search of endmembers in hyperspectral data. Sensors, 2008,8:1321�C1342.
[17] Craig M D.. Minimum-volume transforms for remotely sensed data[J]. IEEE Transactions on Geoscience and Remote Sensing, 1994,32(3): 542�C552.
[18] Ifarraguerri A and Chang C I.. Multispectral and hyperspectral image anlysis with convex cones[J]. IEEE Transactions on Geoscience and Remote Sensing, 1999, 37(2): 756�C770.
[19] Berman M, Kiiveri H, et al.. ICE: an automated statistical approach to identifying endmembers in hyperspectral images[J]. IEEE International Geoscience and Remote Sensing Symposium, France: Toulouse,2003, 1:279�C283.
[20] Berman M, Kiiveri H, et al.. ICE: a statistical approach to identifying endmembers in hyperspectral images. IEEE Transactions on Geoscience and Remote Sensing[J]. 2004, 42(10): 2085�C2095.
[21] Kumar, U.. Constrained Linear Spectral Unmixing Technique for Regional Land Cover Mapping Using MODIS Data[C]. International Joint Conferences on Computer, Information, and Systems Sciences, and Engineering, 2007.
[22] Singh, Dharmendta. A Pixel Purity Index and Curyelet based approach for the fusion of ASTER and MODIS data for land cover classficaiton[C].37th COSPAR Scientific Assembly.2008.
[23] Kaiwen Zhong, Xulong Liu, et al. Endmembers extraction using time series of MODIS and TM samples[J], Proc. SPIE 6790, 67900R (2007).
[24] ֣�з�,���F�,��.����MODISң�����ݵĻ����Ԫ�ֽ⼼���о���Ӧ��[J].�Ͼ�����ѧԺѧ��,2008,31(2):145-150.
[25] ������.�������Թ����ģ��(LSMM)�����ֲ�ͬ��Ԫֵѡȡ����Ӧ�������ۡ����Թ�����Ϊ��[J].ң�м�����Ӧ��,2008,23(03):272-277.
[26] �Ỷ,������,��.����ң�е��½�������ѩ�Ƕȼ�ѩ����[J].��Ȼ�ֺ�ѧ��,2008.(05):52-57.
[27] ��ϼ,����,��.���ڻ����Ԫ�ֽ���ȡ����ֲ�����Ӧ��̽��[J].ũҵ����ѧ��.2008,24(1):213-217.
[28] ��ˮɭ.���ڲ�������﴿��Ԫʶ������ֲ���ң�й���[D].����:�й���ѧԺң��Ӧ���о���,2005.
[29] �ƺ�,�����,��.������ͼģ�͵����Դ������Ľ��㷨[J].����ѧ�������,2005,25(8):1180-1183.
[30]�⽡ƽ,������.ң�����ݷ������ľ��ȷ���[J].ң�м�����Ӧ��,1995,10(1):17-24.

