
“四同”条件下周口城区高分一号遥感影像分类对比研究
1 引言 随着卫星遥感技术发展,越来越多的高分辨率遥感卫星成功发射,为人们科研生产提供丰富的基础数据资料。然而,面对日益丰富的高分辨率卫星遥感数据,如何实现影像信息快速、准确提取是高分辨卫星遥感应用的重要问题。 遥感影像分类是遥感应用的重...
- 作者:叶杰, 孟凡晓, 白潍铭, 张斌, 郑金明.来源:地球信息科学学报|2021年01月12日
1 引言
随着卫星遥感技术发展,越来越多的高分辨率遥感卫星成功发射,为人们科研生产提供丰富的基础数据资料。然而,面对日益丰富的高分辨率卫星遥感数据,如何实现影像信息快速、准确提取是高分辨卫星遥感应用的重要问题。
遥感影像分类是遥感应用的重要内容。遥感影像分类按发展分为人工目视解译、计算机自动分类2个阶段。人工目视解译精度高,但效率低、对主观知识依赖强,不适合大面积影像分类。计算机自动分类精度普遍不如人工目视解译,但其处理效率高,受主观因素影响小、普适性强,是目前遥感分类主流方式。计算机自动分类按照处理单元不同分为面向像元、面向对象2类。面向像元分类处理基本单位为单个像元[1],国内外学者采用面向像元分类方法进行大量实验并取得了较好的分类效果[2,3,4]。然而,面向像元分类虽然处理效率快,但具有“椒盐”现象严重、后期处理复杂等缺点,尤其对于高分辨影像处理效率低、分类效果差。面向对象分类处理单元是具有相似光谱或空间特征的影像对象[5],它利用光谱信息、纹理和上下文关系等信息对影像分类。大量研究表明面向对象分类是一种效率较高、精度较高的分类方式[6,7]。
国内外针对面向像元与面向对象分类已开展大量对比研究[8,9,10,11,12,13,14],如Hadi等[8]以Terre-5卫星影像为基础,分别采用最大似然分类器、K近邻面向对象分类器对巴生河流域热带景观进行面向像元与面向对象的分类对比研究,结果表明K近邻面向对象分类的误差率比最大似然分类的误差率低250%,K近邻面向对象分类性能比最大似然分类法有很大提高。Piazza等[9]以机载高空间分辨率为数据源,对巴西南部的圣卡塔琳娜州次生常绿雨林覆盖研究区进行面向像元与面向对象的分类对比研究,面向像元采用ENVI监督分类最大似然法和非监督分类K-means法,面向像元采用eCognition监督决策树法,结果表明面向像元分类单类别分类精度在62%到63%,而面向对象分类单类别精度提升至89%到91%,与面向像元分类方法相比,本研究采用的面向对象的分类方法取得了令人满意的准确率,总体准确率提高了40%。2018年Wang等[13]以Pléiades-1为数据源,采用机器学习DT、SVM、RF分类器,分别在IDL、eCognition环境下,对中国广州南沙湿地公园人工红树林树种进行面向像元、面向对象分类,结果表明面向像元、面向对象2种分类方式都可以识别主要人工红树林树种,但总体上面向对象方法具有更好的性能;面向像元SVM算法的总体分类准确率最高,为79.63%,面向对象RF算法总体分类准确率最高,为82.40%。
通过总结前人研究发现:对于同一影像,面向对象分类效果总体优于面向像元分类效果。然而不难发现,二者对比分析时采用的算法、软件样本均不同,这就引入了多方面系统误差从而导致验证结果不严谨,可信度低。为了更准确比较2种分类方式,更好理解面向像元、面向对象2种解译思想,本文以国产高分一号2 m融合影像为遥感数据源,以河南周口城区为研究区,设计一套“四同”条件下的面向像元、面向对象的分类对比实验,即在eCognition软件平台、同一套训练样本、3种机器学习(分别为CART、SVM、RF)算法、同一套验证样本条件下进行2种分类,并基于混淆矩阵完成精度评价与分析。
2 研究区概况与数据来源
2.1 研究区概况
研究区位于河南省周口城区及附近(图1),地处114°36.33′E—114°43.3′E,33°35.00′N—33°40.00′N,总面积约100 km2。研究区地处中纬度地带,属于亚热带季风气候和暖温带季风型气候混合气候,地属黄淮平原,地势西北高东南低,属淮河流域,主要有颍河、洪河两大水系。
图1
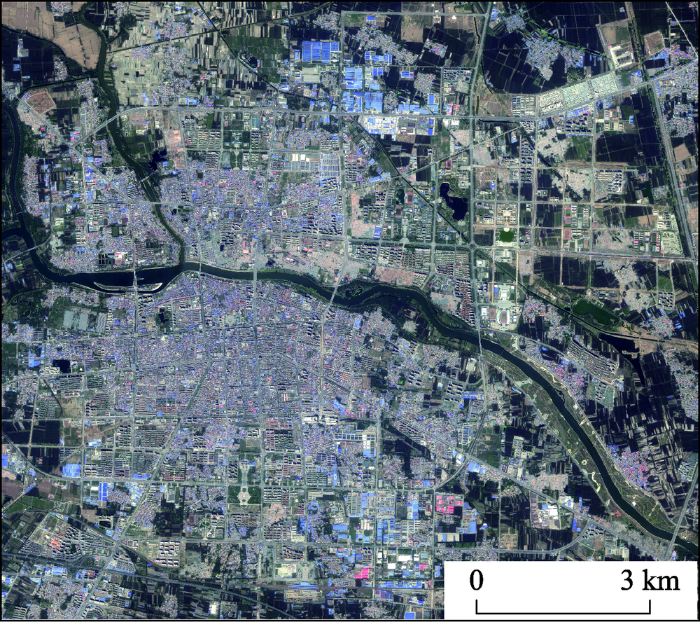
图1 2018年4月17日周口城区GF-1融合影像
Fig. 1 Fusion remote sensing image of GF-1 satellite for the main districts of Zhoukou acquired on April 17, 2018
2.2 数据来源与预处理
本文遥感数据采用国产高分一号数据,来源于中国资源卫星研究中心(http://www.cresda.com/CN/),具体参数如表1所示。本文选择成像日期为2018年4月17日2 m全色、8 m多光谱波段,基于ENVI、ARCGIS完成数据预处理,得到配准误差在0.5个像元内、空间分辨率为2 m高分一号融合影像。
表1 高分一号卫星遥感数据参数
Tab. 1
| 参数 | 2 m分辨率全色/8 m分辨率多光谱 | 16 m分辨率多光谱 | |
|---|---|---|---|
| 光谱范围/μm | 全色 | 0.45~0.90 | - |
| 多光谱 | 0.45~0.52 | 0.45~0.52 | |
| 0.52~0.59 | 0.52~0.59 | ||
| 0.63~0.69 | 0.63~0.69 | ||
| 0.77~0.89 | 0.77~0.89 | ||
| 空间分辨率/m | 全色 | 2 |
16 |
| 多光谱 | 8 | ||
| 幅宽/km | 60(2台相机) | 800(4台相机) | |
新窗口打开| 下载CSV
3 研究方法
3.1 分类体系建立
结合研究区特点及资料[15]发现:由于研究区所处位置及其城市土地覆盖类型不同不能直接使用已有分类体系,需根据实际情况进行修改。因此,结合周口城区地物影像特征、空间分布建立本文分类体系,分为建筑用地、水体湿地、交通用地、农业用地、林草地5大类。
3.2 面向像元分类方法
面向像元分类根据是否需要分类人员事先提供已知类别或定义训练样本,将遥感影像分类分为非监督分类、监督分2种方式[16]。本文面向像元分类采用监督分类。由于eCognition是针对面向对象分类的专门软件,因此首要解决的问题是如何进行像元级分割。本次实验采用棋盘分割,分割尺度与像元大小一致实现像元级分割;然后基于训练样本,选择蓝、绿、红、近红外4个光谱特征,在eCognition中采用CART、SVM、RF 3种机器学习分类器完成面向像元城市用地遥感分类,并基于验证样本对分类结果进行主、客观精度评价。
3.3 面向对象分类方法
本文面向对象的分类方法流程依次为影像分割、最优特征集确定、机器学习分类、精度评价,具体如图2所示。
图2

图2 面向对象分类流程
Fig. 2 Workflow of object-based classification in the study area
(1)影像分割。分割是面向对象分类的前提。目前eCognition软件多尺度分割算法应用较成熟[17],因此本研究采用多尺度分割进行影像分割。该分割效果主要由影像图层权重、形状因子和紧致度因子、分割尺度决定[18]。
考虑到研究区地物类型及特征,本研究设置各波段权重均为1。通过控制变量法确定最佳形状因子和紧致度因子,分别为0.1、0.3。利用ESP(Estimation of Scale Parameter)插件实现最优分割尺度初步筛选[19],把分割尺度缩小在0~200范围内;再以步长10为间隔,采用20个不同尺度(10、20、…,200)进行分割。最后,通过比较分割对象的亮度均值标准差与亮度标准差均值,发现分割尺度为40时影像城市地物分割效果最好。
(2)最优特征集筛选。如何选择适合的特征是实现图像分类的关键步骤。通过研究发现可以借助一些算法进行特征选择,但它们通常无法处理大量特征且实现复杂,对编程能力要求高[20]。因此本文利用K近邻分类器原理找到类别之间区分的最大平均最小距离的特征组合作为分类最优特征集。
最优特征集筛选流程:① 在分割后影像进行样本选择,为保证精度每类样本数量在50个以上;② 通过Feature Space Optimization工具进行初始特征集选择,本文初始特征集选择常用43个特征;③ 分析筛选结果,选择15维度时的特征集作为最优特征集,如表2所示。
表2 面向对象分类最优特征集
Tab. 2
| 特征类型 | 特征名称 | 物理意义 |
|---|---|---|
| 光谱特征 | Mean R | R波段均值 |
| Ratio R | R波段比率 | |
| quantile[50] (R) | R波段分位数 | |
| Max.diff. | 最大差值 | |
| Standard deviation NIR | NIR波段标准偏差 | |
| HIS Transformation Saturation | HIS空间饱和度 | |
| 形状特征 | Area Shape index Density Elliptic Fit Compactness(polygon) |
面积 |
| 形状指数 | ||
| 密度 | ||
| 椭圆拟合率 | ||
| 紧致度 | ||
| 纹理特征 | GLCM Entropy(all.dir.) GLCM Homogeneity(all.dir.) |
灰度共生矩阵熵 |
| 灰度共生矩阵均质性 | ||
| 自定义特征 | NDWI NDVI |
归一化水体指数 |
| 归一化植被指数 |
注:表中光谱特征、形状特征、纹理特征包含所有特征均参考eCognition软件Reference Book,自定义特征NDWI为归一化水体指数,详见文献[
新窗口打开| 下载CSV
3.4 样本制作
本文所涉及的样本包括训练样本、验证样本。训练样本容量每类应至少包含10~30n个,n为影像波段数,以保证某些分类算法中需要的方差-协方差矩阵计算[23]。本实验中高分一号融合影像共计4个波段,故n=4,即每类应至少包括40个训练样本。验证样本参考最小样本数规则,即每类至少50个[24,25]。另外,为减小样本受地物规则分布的影响,两样本分布均采用随机分布;为了使精度验证更科学,参考高分辨率近时相Google地图。结合实地踏勘数据,基于目视解译在ARCGIS中生成随机点完成研究区训练样本、验证样本制作,如图3所示。
图3

图3 训练样本、验证样本、实地踏勘点分布
Fig. 3 The distribution of training, verification sample and investigation site
3.5 机器学习分类器
(1)CART分类器。CART(Classification and Regression Tree),即分类回归树算法,它是Breiman于1984年提出的一种数据分析的非参数统计算 法[26],已经在遥感分类中得到了广泛应用[27,28,29]。CART算法通过使用预先设置的标准对数据进行递归分割,直至完成所有的非叶子节点与叶子节点划分。
(2)SVM分类器。SVM(Support Vector Machine),即支持向量机算法,于1995年Cortes和Vapnik提出的统计学习理论分类算法[30]。SVM是由一个分离超平面定义的判别分类器。即给定有标记的训练数据,SVM寻找一个超平面对目标样本进行分割,将新样本分配给其中一个类别或另一个类别。目前SVM算法广泛已应用于遥感影像分类[31,32,33,34]。
(3)RF分类器。RF(Random Forests)即随机森林算法,是利用多棵随机、独立的决策树对样本进行训练、预测的一种集成分类器,该分类器由Breiman和Cutler提出[35]。RF以其运行效率高、无需考虑多元共线性的优点在遥感影像分类中得到广泛应用[36,37]。
3.6 精度评价方法
本文分类精度评价基于混淆矩阵完成[38]。利用混淆矩阵计算4种分类精度评价指标:生产者精度(Producer's Accuracy,PA)、用户精度(User's Accuracy,UA)、总体精度(Overall Accuracy,OA)和Kappa系数。其中,生产者精度和用户精度用于单类别分类评价,总体精度和Kappa系数用于整体分类评价。
(1)生产者精度。生产者精度是指某类别中被正确分类的像元数占参考数据中此类别的像元总数的比例,其计算公式如式(1)所示。
式中:PA为生产者精度;xii为被正确分类的像元数;
(2)用户精度。用户精度是指某类别中被正确分类的像元数占分类结果图中此类别的像元总数的比例,其计算公式如式(2)所示。
式中:UA为生产者精度;xii为被正确分类的像元数;
(3)总体精度。总体精度是指被正确分类的各类别像元总数占样本总数的比例,其计算如式(3)所示。
式中:OA为生产者精度;
(4)Kappa系数。Kappa系数是分类图与参考数据吻合程度的综合反映,范围在0-1之间。Kappa系数通过主对角线、行列总数得出的概率一致性表达的。Kappa系数计算公式如式(4)所示。
式中:r是矩阵行数,即总分类类别数;xii是误差矩阵中第i行、第i列上样本数量(即正确分类的数目);xi+和x+i分别是第i行和第i列的和;N是所有样本总数。
4 结果与分析
4.1 城市用地分类结果
利用第3节所述方法,结合分类体系、训练样本,基于eCognition、ARCGIS软件对周口城区高分一号融合多光谱影像进行面向像元、面向对象2种分类方式、3种机器学习算法的遥感影像分类并完成制图,6种分类效果如图4所示。
图4

图4 基于GF-1号卫星影像周口城区面向像元与面向对象的3种分类器(CART、SVM、RF)分类方法下的结果比较
Fig. 4 Comparison of pixel-based and object-based classification under three machine learning classifiers including CART, SVM and RF using GF-1 remote sensing image for classing the main district of Zhoukou urban
4.2 精度评价与分析
对“四同”条件下面向像元、面向对象分类进行主、客观精度评价。由图4发现,3种面向像元分类器算法可以较好地实现城区地物分类,但“椒盐”现象、错分现象严重,对分类后处理提出很大要求;而3种面向对象分类目视效果有很大提高、类别更整齐、碎斑现象更少,分类效果更好。
由表3可知,3种面向像元分类中RF分类效果最好,Kappa系数为0.72,总体分类精度为78.02%;SVM分类次之,Kappa系数为0.71,总体分类精度为77.75%;CART分类效果最差,Kappa系数为0.64,总体分类精度为71.43%。而3种面向对象分类算法的Kappa系数、总体精度均高于面向像元分类,其中RF分类效果最好,Kappa系数为0.92,总体分类精度为93.40%,SVM分类次之,Kappa系数为0.91,总体分类精度为92.58%,CART分类效果最差,Kappa系数为0.88,总体分类精度为90.66%。这表明在分割尺度为40时、15个特征下面向对象分类方法是非常可取的,满足周口城区城市遥感信息提取。
综合比较2种分类方式下3种机器学习分类的Kappa系数与总体分类精度,对本次研究3种机器学习分类器分类性能进行评价,结果发现分类性能最好的是RF、SVM次之,CART性能最差。
表3 基于GF-1号卫星影像周口城区面向像元、面向对象下的3种分类器(CART、SVM、RF)分类精度评价
Tab. 3
| 面向像元CART分类混淆矩阵 | 面向对象CART分类混淆矩阵 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | ||
| 农业用地 | 64 | 6 | 0 | 9 | 4 | 83 | 77.10 | 农业用地 | 71 | 3 | 0 | 0 | 1 | 75 | 94.67 |
| 林草地 | 4 | 59 | 0 | 5 | 3 | 71 | 83.10 | 林草地 | 2 | 61 | 0 | 1 | 0 | 64 | 95.31 |
| 水体湿地 | 0 | 0 | 47 | 8 | 0 | 55 | 85.45 | 水体湿地 | 1 | 0 | 50 | 0 | 0 | 51 | 98.04 |
| 建筑用地 | 12 | 0 | 4 | 51 | 33 | 100 | 51.00 | 建筑用地 | 2 | 1 | 1 | 80 | 10 | 94 | 85.10 |
| 交通用地 | 0 | 0 | 0 | 16 | 39 | 55 | 70.90 | 交通用地 | 4 | 0 | 0 | 8 | 68 | 80 | 85.00 |
| 总计 | 80 | 65 | 51 | 89 | 79 | 总计 | 80 | 65 | 51 | 89 | 79 | ||||
| PA/% | 80.00 | 90.77 | 92.16 | 57.30 | 49.37 | PA/% | 88.75 | 93.85 | 98.04 | 89.89 | 86.08 | ||||
| OA=71.43% Kappa=0.64 | OA=90.66% Kappa=0.88 | ||||||||||||||
| 面向像元SVM分类混淆矩阵 | 面向对象SVM分类混淆矩阵 | ||||||||||||||
| 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | ||
| 农业用地 | 71 | 2 | 0 | 4 | 3 | 80 | 88.75 | 农业用地 | 72 | 1 | 0 | 1 | 3 | 77 | 93.50 |
| 林草地 | 3 | 63 | 0 | 3 | 0 | 69 | 91.30 | 林草地 | 1 | 64 | 0 | 3 | 1 | 69 | 92.75 |
| 水体湿地 | 0 | 0 | 48 | 0 | 0 | 48 | 100.00 | 水体湿地 | 0 | 0 | 51 | 1 | 0 | 52 | 98.08 |
| 建筑用地 | 5 | 0 | 3 | 60 | 35 | 103 | 58.25 | 建筑用地 | 5 | 0 | 0 | 79 | 4 | 88 | 89.77 |
| 交通用地 | 1 | 0 | 0 | 22 | 41 | 64 | 64.06 | 交通用地 | 2 | 0 | 0 | 5 | 71 | 78 | 91.03 |
| 总计 | 80 | 65 | 51 | 89 | 79 | 总计 | 80 | 65 | 51 | 89 | 79 | ||||
| PA/% | 88.75 | 96.92 | 94.11 | 67.42 | 51.90 | PA/% | 90.00 | 98.46 | 100.00 | 88.76 | 89.87 | ||||
| OA=77.75% Kappa=0.71 | OA=92.58% Kappa=0.91 | ||||||||||||||
| 面向像元RF分类混淆矩阵 | 面向对象RF分类混淆矩阵 | ||||||||||||||
| 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | ||
| 农业用地 | 66 | 3 | 0 | 9 | 5 | 83 | 79.52 | 农业用地 | 72 | 1 | 0 | 0 | 1 | 74 | 97.30 |
| 林草地 | 7 | 62 | 0 | 6 | 3 | 78 | 79.49 | 林草地 | 1 | 64 | 0 | 3 | 0 | 68 | 94.12 |
| 水体湿地 | 0 | 0 | 49 | 3 | 0 | 52 | 94.23 | 水体湿地 | 0 | 0 | 51 | 0 | 0 | 51 | 100.00 |
| 建筑用地 | 6 | 0 | 2 | 50 | 14 | 72 | 69.44 | 建筑用地 | 5 | 0 | 0 | 82 | 7 | 94 | 87.23 |
| 交通用地 | 1 | 0 | 0 | 21 | 57 | 79 | 72.15 | 交通用地 | 2 | 0 | 0 | 4 | 71 | 77 | 92.20 |
| 总计 | 80 | 65 | 51 | 89 | 79 | 总计 | 80 | 65 | 51 | 89 | 79 | ||||
| PA/% | 82.50 | 95.38 | 96.08 | 56.18 | 72.15 | PA/% | 90.00 | 98.46 | 100.00 | 92.13 | 89.87 | ||||
| OA=78.02% Kappa=0.72 | OA=93.40% Kappa=0.92 | ||||||||||||||
新窗口打开| 下载CSV
结合表3、图5、图6可知,面向像元、面向对象 2种分类方式中水体湿地的生产者精度和用户精度总体最高,林草地、农业用地次之,交通用地、建筑用地生产者精度和用户精度最低。但面向对象分类较面向像元分类整体效果明显提升,以RF分类为例,建筑用地生产者精度由56.18%提高至92.13%,用户精度由69.44%提高至87.23%;交通用地生产者精度由72.15%提高至89.87%,用户精度由72.15%提高至92.20%。面向像元分类中交通用地、建筑用地错分、漏分现象严重,如图7所示。这是由于二者密集交错分布,纹理和光谱具有相似性,面向像元分类仅通过像元光谱特征无法准确区分二者,而面向对象处理单元为“纯净”影像对象,根据对象的光谱、纹理、空间关系等多特征进行分类,具有更强的地物识别能力,因此分类精度更高。
图5

图5 周口城区面向像元分类下3种分类器(CART、SVM、RF)单类别PA、UA比较
Fig. 5 Comparison of producer's accuracy and user's accuracy of pixel-based classification(under three machine learning classifiers including CART, SVM and RF) for Zhoukou urban at class level
图6

图6 周口城区面向对象分类下3种分类器(CART、SVM、RF)单类别PA、UA比较
Fig. 6 Comparison of producer's accuracy and user's accuracy of object-based classification(under three machine learning classifiers including CART, SVM and RF) for Zhoukou urban at class level
图7

图7 周口城区面向像元、面向对象下的3种分类器(CART、SVM、RF)分类结果局部细节图对比
Fig. 7 Comparison of local details of pixel-based and object-based classification for Zhoukou urban under three machine learning classifiers including CART, SVM and RF
5 结论与展望
本文在同软件平台、同分类器、同训练样本、同验证样本即“四同”条件下,对高分一号周口城区融合影像进行面向像元、面向对象的分类对比研究,并进行了主观、客观评价精度评价。结果表明:
(1)本文突破常规面向像元、面向对象分类对比研究,实现“四同”条件下高分一号周口城区影像面向像元、面向对象2种分类方法,CART、SVM、RF 3种机器学习算法的分类验证,并基于混淆矩阵完成精度评价。
(2)“四同”条件下面向像元、面向对象2种遥感影像分类方式均可实现周口城区高分一号影像城市用地信息提取,但面向对象的方法总体效果较好,与前人研究结论一致。在面向像元分类中,RF分类效果最好,Kappa达到0.72,SVM、CART依次降低,面向像元分类“椒盐”现象严重;而面向对象分类中RF分类效果最好,Kappa达到0.92,SVM、CART依次降低,面向对象分类有效克服“同物异谱、同谱异物”现象具有更好的目视效果。
(3)单类别建筑用地、交通用地的用户精度和生产者精度总体较低,但面向对象分类较面向像元分类效果明显提升,以RF分类为例,建筑用地生产者精度由56.18%提高至92.13%,用户精度由69.44%提高至87.23%;交通用地生产者精度由72.15%提高至89.87%,用户精度由72.15%提高至92.20%。
尽管本文得出以上结论,但仍不能片面、绝对地认为任何条件下面向对象分类效果一定好于面向像元,因为二者作为不同的解译思想有其各自普适性和局限性,选择何种分类方式须视情况而定。本实验仅对高分一号2 m融合影像进行分类,未对其他高、中、低分辨遥感影像进行研究,未来尝试不同传感器类型、不同分辨率的卫星遥感2种分类研究。另外,本文在面向对象分割中仅使用单一分割尺度作为最终分割尺度,未来研究中根据不同地物类型、分布探究多层次多尺度分割,从而提高影像分割精度;在基于机器学习分类器分类时,未考虑模型参数变化影响,在下一步研究中调节模型参数以提高分类精度。
下一篇:没有了!
