
多波束与单波束测深技术应用精度对比及实用性分析
1概述 近年来,多波束回声测深系统在我国水下测量中逐渐得到重视。目前,已有许多单位引进了不同型号的的多波束测深仪。从技术的发展来看,多波束测深技术尽管经历了短短30年的发展,但其研究和应用已达到了较高的水平。特别是近十几年,在高新能计算机、...
- 作者:樊小涛,彭 斌,张 鹏来源:2014测绘学|2015年01月04日
1概述
近年来,多波束回声测深系统在我国水下测量中逐渐得到重视。目前,已有许多单位引进了不同型号的的多波束测深仪。从技术的发展来看,多波束测深技术尽管经历了短短30年的发展,但其研究和应用已达到了较高的水平。特别是近十几年,在高新能计算机、高分辨率显示、高精度定位和各种数字化传感器以及其他相关高新技术的介入和支撑下,多波束测深系统获得了极大地发展。多波束测深是一种具有高效率、高精度和高分辨率的水下地形测量新技术。与传统单波束测深系统相比较,多波束测深系统具有测量范围大、速度快、精度高等优点。它把测深技术从原先的点线状扩展到面状,并进一步发展到立体测图,从而使水下地形测量技术发展到一个较高的水平。多波束测深能够对水下地行进行全覆盖测量,具有同步测深点多、测量快捷、全覆盖等特点,能完成常规方法无法完成的测量任务,尤其适用于大比例尺的测绘和特殊要求的水道地形测量等。由于多波束具有实时监控功能,可以现场监视水下地物地貌的细微变化,因而在堤防安全、溃口、崩岸监测、水下工程施工监测、港口及疏浚工程监测、水下物体摸探及打捞等方面具有其他方法不可替代的作用。
目前,水文测量系统的测深技术主要是单波束测深技术,多波束测深系统在全国范围内应用较少,本文选择的SONIC2024多波束测深系统和无锡海鹰HY1601单波束测深系统在典型的水下地形区域--长江重庆主城区河段中的应用进行对比分析。
2 水深测量系统
2.1 SONIC2024多波束测深系统
SONIC2024多波束测深系统是一种多传感器的复杂组合测量系统,主要由换能器、CARIS数据处理系统、PDS2000声纳处理器GNSS卫星定位系统、运动传感器、声速剖面仪等构成。SONIC2024多波束换能器波束个数达256个,发射端和接收端呈“T”字形,工作频率为200~400KHZ频段内实时可选,且波束发射角为10゜~160゜,且在线实时可调,其测深最大量程可大500米,测深精度为1.25cm,发射速率可达75HZ[1],精度符合国际海道测量组织(IHO)S-44精度标准。
由于多波束系统是一套多传感器系统,各传感器的时间同步性、传感器的安装位置、角度等各种偏差对测量成果精度均产生影响。因此,在进行多波束测深前,需要对这些偏差进行校准。校准的方法是采集一系列特定测线的数据,通过PDS2000校正功能进行计算,得到多波束换能器的纵摇(Pitch)、横摇(Roll)、艏摇(Yaw)等安装偏差。该软件所要求的校准要求及方法见表1。
表1 校准的方法及要求
|
序号 |
项目 |
地形要求 |
校准要求 |
航速要求 |
|
1 |
横偏 |
平坦地形 |
同1条测线、反方向测2次 |
2次同速、正常测量速度 |
|
2 |
纵偏 |
斜坡或目标物 |
同1条测线、反方向测2次 |
2次同速、正常测量速度 |
|
3 |
艏偏 |
斜坡或目标物 |
2条线、10%-50%覆盖,同方向2次 |
2次同速、正常测量速度 |
Sonic2024换能器和各种传感器的安装误差均比较小,校准结果比较准确,校准结果见表2。
表2 Sonic 2024型宽带多波束测深仪校正参数/(゜)
|
系统名称 |
GNSS延时 |
横摇(Roll) |
纵摇(Pitch) |
艏摇(Yaw) |
|
Sonic2024系统 |
同 步 |
1.970 |
-1.090 |
5.560 |
更换测船或重新安装后,都应重新进行校正,获取新的校正参数。
2.2 HY1601双频测深系统
HY1601测深仪是一款单波束数字测深系统,融计算机技术、数字信号处理与计算机图形成像技术于一体,采用一体化嵌入式系统结构,内置嵌入式工控系统,实现了测深仪与计算机平台的完美结合,高度体现了测深仪操作与控制的数字智能化。HY1601测深仪的工作频率为208kHz。HY1601测深仪基本的系统组成为:测深仪主机、换能器、计算机控制软件(包括:DFNow.exe-工作软件、DFPlayBack.exe-回放软件)。该数字测深系统的一体化内置计算机系统的便携式测量模式,充分利用计算机资源,实现全面数字化测深应用,是目前国产最为先进和可靠的全数字测深系统,适用于江河、港航和海岸带等各种复杂水况下的水深测量工程[2]。
3水下区域选取与比测
长江重要的水下工程包括河段整治、冲淤变化、水下抛石、水下潜坝等,其中大部分水下工程,看不见、摸不着。各项目的河势情况、水文地质条件均不相同。各种目的的技术要求也不相同,精度越高观测难度越大。针对各种项目的特点和难点,在观测中选取技术先进的水下测量方法,实时高效的提供水下地形的真实情况,可以切实保证工程建设质量,大大提高工程技术水平。
本文选取具有代表性的重庆主城区寸滩河段进行比较研究。该河段水下地形复杂,深度变化频繁,河床冲淤交替,泥沙运动十分复杂。由于受地质构造作用的影响,河段在平面上呈连续弯曲的河道形态。在天然情况下,河段内宽窄相间,滩沱交替,并有峡谷河道,河床和两岸一般为基岩、卵石或卵石夹沙组成。在如此复杂的环境下进行多波束与单波束测深技术应用对比精度分析,其结果非常具有代表性。
3.1多波束与单波束测深技术
为了寻求一种更精确、更全面反映水下地形形状的手段,利用SONIC2024多波束测深系统和无锡海鹰HY1601单波束测深系统在重庆市主城区寸滩河段进行比测。SONIC2024多波束测深系统实时进行了姿态补偿改正和时钟同步。HY1601单波束测深系统只进行了声速改正。具体比测方法如下:
(1) 系统自符性比测:通过像对精度评定的方法,在不同的地形区域布设多条交叉重叠的测线,分别获取交叉重叠点的水深数据进行误差分析。
(2) 系统间比测:利用多波束和单波束系统在同一区域分别获取水深数据,对同一坐标位置进行水深比较分析,得出相关的精度统计。并对所生成的地形图进行图形比较和面积对比,得出结论。
3.2系统自符性比测
3.2.1 平坦区域
选取该河段较平坦区域,水下高程在0~40范围内,水深在20m左右,同一测线上连续测量4次,选取160个点进行统计分析,结果见表3。
表3 较平坦区域两种系统自符性精度比较分析统计表
|
统计坐标点数 |
水深相对误差统计 | ||
|
δ≤0.5% |
0.5%<δ≤1.0% |
1.0% <δ | |
|
多波束测深系统 |
96.7 |
3.3 |
0 |
|
单波束测深 |
90.7 |
5.6 |
3.7 |
3
.2.2 陡壁区域
由于重庆主城区属于天然河段,很多地方地形起伏较大,水深变化频繁。为此,特地在该河段选取陡壁区域,水深在8~30m,同一测线上连续测量4次,对所测点进行统计分析,结果见表4。
表4 陡壁区域两种系统自符性精度比较分析统计表
|
统计坐标点数 |
水深相对误差统计 | ||
|
δ≤0.5% |
0.5%<δ≤1.0% |
1.0% <δ | |
|
多波束测深系统 |
94.8 |
3.8 |
1.4 |
|
单波束测深 |
81.8 |
14.6 |
3.6 |
通过表3、表4,可以看出多波束测深系统的自符性在两种区域的相对误差小于0.5%的比例误差在94%以上,而单波束测深系统在陡壁区域的相对误差小于0.5%的比例在82%以下。由此可见,多波束测深系统的自符性优于单波束测深系统,特别是再水下地形起伏较大的区域,优势更加明显。
单波束测深系统在水下地形起伏较大的区域自符性较差的可能原因有:①单波束测深系统在进行测量时没有进行姿态补偿。在测量时,船随着水流摇晃,此时所测的水深不是换能器垂直向下的深度,而是倾斜的长度。在地形起伏较大的区域,更容易造成偏差。②单波束测深系统换能器的波束角大于多波束测深系统的波束角,在水底的波束“脚印”较大,1.5゜波束在垂直下方的“脚印”为0.5,在较大的脚印中,只获取一个简单的深度值,会加大测量误差。
3.2.3 内符合精度统计
在寸滩港区河段内利用校准后的多波束数据进行内符合精度统计,针对共测量22条线,其中8条检查线,14条测线,测区中点坐标:【32***15,36**28】。运行区域水深在5~35m,测量数据统计分析表明内符合精度符合要求,参与统计计算共63678点,98.65%符合IHO特级测量误差标准,99.61%符合IHO一级测量误差标准, 99.88%符合IHO二级测量误差标准。统计表见表5。(单波束内符合精度在此不作统计)
表5 Sonic 2024型宽带多波束测深仪误差统计表(内符合)
|
Beam Number |
Count |
Max (+) |
Min (-) |
Mean |
Std Dev |
Special Order (%) |
Order 1 (%) |
Order 2 (%) |
|
波束编号 |
点数 |
最大误差 |
最小误差 |
均值误差 |
标准 误差 |
符合特级 标准百分数 |
符合一级 标准百分数 |
符合二级 标准百分数 |
|
1 |
293 |
1.295 |
1.588 |
0.010 |
0.353 |
96.9 |
99.7 |
100 |
|
2 |
361 |
3.357 |
0.844 |
0.242 |
0.336 |
97.0 |
99.4 |
99.7 |
|
3 |
454 |
1.491 |
2.779 |
0.243 |
0.350 |
95.2 |
99.3 |
100 |
|
4 |
513 |
3.163 |
3.696 |
0.222 |
0.404 |
94.2 |
99.2 |
99.6 |
|
5 |
533 |
2.288 |
3.323 |
0.226 |
0.395 |
94.4 |
98.7 |
99.8 |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
|
251 |
331 |
2.447 |
5.239 |
0.249 |
0.552 |
90.3 |
97.9 |
98.8 |
|
252 |
279 |
3.161 |
2.451 |
0.337 |
0.508 |
87.1 |
95.7 |
99.3 |
|
253 |
228 |
2.700 |
3.727 |
0.272 |
0.538 |
91.2 |
96.5 |
98.7 |
|
254 |
225 |
3.571 |
1.011 |
0.329 |
0.506 |
87.1 |
97.8 |
98.7 |
|
255 |
201 |
3.330 |
4.359 |
0.313 |
0.616 |
86.1 |
97.0 |
98.5 |
3.3 系统间比测
为检验多波束测深系统的性能,使用多波束测深系统与传统回声测深仪进行研究测量。与传统的单波束测深仪相似,评估多波束测深精度的一种有效方法是采用与主测线相交的检查测线,用这种方法可以评估多波束本身以及各传感器安装、校准、水位改正、声速改正等对测量结果的综合影响。
3.3.1 测深精度对比
在重庆主城区寸滩河段,在水深3m以上区域进行多波束全覆盖测量,单波束按1:1000比例尺进行全河段测量。进行多波束测深系统进行数据处理后抽取与单波束所测的原始数据坐标接近(X、Y相差不超过0.4m)的200个测点水深进行比较,对照成果精度在规范允许的范围内,进行相对误差统计。两种测深技术比测结果及系统间相对误差绝对值统计见表6。
表6 两种系统比测结果及相对误差统计表
|
测点 |
|
多波束测深系统 |
单波束测深 |
|
相对误 差/% | ||||
|
|
X |
Y |
水深/m |
X |
Y |
水深/m | |||
|
1 |
32***80.59 |
36**74.94 |
13.42 |
32***80.48 |
36**74.83 |
13.40 |
0.1 | ||
|
2 |
32***38.65 |
36**63.89 |
10.29 |
32***38.41 |
36**63.70 |
10.20 |
0.9 | ||
|
3 |
32***42.27 |
36**69.16 |
17.31 |
32***42.27 |
36**69.02 |
17.35 |
0.2 | ||
|
4 |
32***66.41 |
36**09.31 |
20.48 |
32***66.31 |
36**09.26 |
20.40 |
0.4 | ||
|
5 |
32***79.04 |
36**91.79 |
19.77 |
32***79.09 |
36**91.60 |
19.87 |
0.5 | ||
|
6 |
32***51.52 |
36**63.65 |
24.84 |
32***51.46 |
36**63.51 |
24.89 |
0.2 | ||
|
… |
… |
… |
… |
… |
… |
… |
… | ||
|
198 |
32***41.38 |
36**88.51 |
33.51 |
32***41.25 |
36**88.64 |
33.46 |
0.1 | ||
|
199 |
32***05.25 |
36**61.29 |
27.41 |
32***05.38 |
36**61.50 |
27.29 |
0.4 | ||
|
200 |
32***14.65 |
36**44.50 |
9.87 |
32***14.76 |
36**44.71 |
9.80 |
0.3 | ||
3.3.2 数字地形图对比
(1)地形图对比
相对于单波束测深仪,多波束测量数据点密,能够更精确地测出水下目标物的大小、形状和高低变化,绘制的等深线更详细,也更真实地反映地形地貌特征。如图1所示。
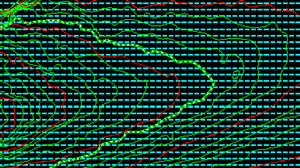
图1 左为多波束数据地形图,右为单波束数据地形图
(2)测点对比
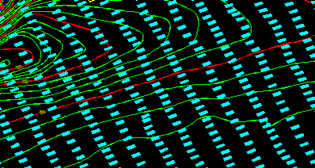
R2 Sonic 2024多波束测深系统可以在测量过程中根据实际环境调整系统频率和扇面角,在水深不超过50 m的水域中,能保证测点距为1 m或更小;而传统测深仪波束角固定且比较大,测点距只能勉强达到5 m。如图2所示。
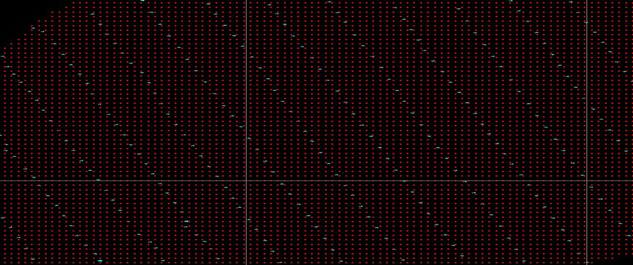
图2 红色为多波束数据,蓝色为单波束数据
3.2.3 面积对比
根据此次在寸滩港区的比测数据,利用单波束测深仪数据绘制了5 m点距的地形图,用多波束数据按不同点距绘制了1~4m的地形图,分别建立DTM模型,计算不同等深线所围面积,并计算相对误差(传统测深仪和多波束测深系统在不同等深线计算的面积差值,与多波束测深系统计算面积的百分比),具体如表7所示。由表可见随着更细化的地形,面积相差越大,最大的接近 36%,说明多波束能更全面地反映每个地形的细节情况。
表7 两种系统面积差统计
|
高程(m) |
|
多波束测深(测点间距1m)计算面积 |
单波束测深仪(测点间距5m)计算面积 |
|
差值统计% |
|
-17 |
|
17540 |
17485 |
|
0.3 |
|
-18 |
|
9766 |
9717 |
|
0.5 |
|
-19 |
|
5335 |
5285 |
|
0.9 |
|
-20 |
|
2211 |
2129 |
|
3.7 |
|
-21 |
|
716 |
656 |
|
8.4 |
|
-22 |
|
113 |
72 |
|
36.3 |
4多波束测深系统在其他方面的应用
多波束具有导航轨迹存储和回放功能,可对同一水域进行多年对照测量。可提供高分辨率的水下地形图、横断面图、深泓图和三维图,能够反映细节的变化,可做出河道变化、演变的研究。图3是某河道的变化趋势,图中虚线是 2011年洪水期的等深线,实线是 2013 年洪水期的等深线,可见左岸原来 -18 m 的等深线现已经是扩大到 -21 m,右岸处深坑面积扩大,底部有所淤积。

图3 **河道变化趋势图
5 结论
通过对重庆主城区寸滩河段不同地形区域的比测分析,可以得出以下结论
(1)通过与单波束测深数据对比分析,多波束测深系统的系统精度是可靠的。与单波束测深数据相比,多波束测量数据点密,能够更精确地测出水下目标物的大小、形状和高低变化,绘制的等深线更详细,也能更真实地反映地形地貌特征。对水下物体寻找也更能发挥其自身的优点。
(2)多波束系统测量产生的数据量极大,后续内业处理工作也较为复杂,人工干预会对处理结果正确与否产生较大影响。对水流湍急、浅滩地区也无法进行测量。在对寸滩河段平坦区域进行比测时,也只能对深水航道区域进行测量,对大部分浅滩地区则无法进行施测。验证表明:该系统对深水(>3m)区域的大比例尺、小范围的测图有着传统测深系统无法比拟的优点;但不适宜进行浅滩地区的小比例尺、大范围的区域测量。
(3)由于多波束测深系统较为笨重,安装较为复杂;外业操作也较为繁琐。与单波束测深系统相比,多波束测深系统需要投入更多的人力、财力,且外业操作与内业处理均需要花费更多的时间与精力。
(4)与传统的单波束测深系统相比,多波束测深系统的误差具有复杂性和隐蔽性。内河(海况)因素、人为操作不合理、系统参数设置不合理、多波束仪器的自噪声、测船的本底噪声、其他设备的声波干扰、周围船舶对水体的扰动、水底底质对声波的影响等等,都会不同程度地给多波束系统的正常测量工作带来的一定的干扰与影响[3]。因此,在多波束系统作业的各个阶段,必须进行周密细致的布置、切实有效的质量控制、科学正确的精度评估,才能有效的提高多波束测深成果质量,充分发挥多波束测深系统的优越性。
(5)在测量及资料处理中,涉及的参数较多,且对测量结果的正确与否影响很大。在纵摇、横摇和动态吃水对测深的综合影响中,动态吃水的影响最为直接,而且占有较大的比重,但在实际生产中,其影响往往被忽视,应加强测定船姿的意识。
参考文献
[1] 赵建虎,刘经南.多波束测深系统的现状和发展趋势。[J].海洋测绘。2008,(5):7-8.
[2]海鹰加科海洋技术有限公司。HY1601使用说明书[M].
[3] 李成刚,王伟伟,周军等.传统多波束系统与具有相干特点的多波束系统的研究[J].海洋测绘,2007.27(2):70-80.
下一篇:一种简易的GNSS接收机自检方法
