
一种简易的GNSS接收机自检方法
1 引言 GNSS接收机的天线相位中心是指微波天线的电气中心,其理论设计应该与天线几何中心一致,但实际应用中,天线相位中心与天线几何中心总是存在一定的偏差,该偏差称为天线相位中心偏差[1]。而GNSS接收机的内部噪声,主要是由于接收机延迟锁相环、...
- 作者:张永毅,张兴福来源:2014测绘学|2015年02月04日
1 引言
GNSS接收机的天线相位中心是指微波天线的电气中心,其理论设计应该与天线几何中心一致,但实际应用中,天线相位中心与天线几何中心总是存在一定的偏差,该偏差称为天线相位中心偏差[1]。而GNSS接收机的内部噪声,主要是由于接收机延迟锁相环、钟差等引起的测量误差的综合反映。在GNSS接收机检定中,天线相位中心偏差的检定和接收机内部噪声的检定都是必不可少的。常用的检定GNSS接收机天线相位中心偏差的方法主要有三种,即旋转天线法、相对定位法和交换天线法[1,2]。接收机内部噪声的检验方法主要有两种,即零基线法和超短基线法[3]。
目前通常的做法是将GNSS接收机送到专门的GNSS接收机检定部门进行检定,检定结果的有效期一般为1年,检定结果的精度和可靠度有保证,但检定费用较高。本文主要探讨通过自设简易检定场,采用超短基线及相对定位方法来计算天线相位中心偏差及内部噪声水平的可行性,以实现GNSS接收机的快速自检,特别适合在作业前快速确定GNSS接收机内部噪声或相位偏差是否满足规范,整个实现过程较为简单、方便。
2 原理与方法
2.1 天线相位中心偏差水平分量检定
本文的检定实验采用站心地平坐标系,将WGS-84坐标系下的超短基线向量转换为站心地平坐标系下的基线向量[4]。本文采用相对定位法测定GNSS接收机天线相位中心偏差的主要流程为:(1)将两台GNSS接收机天线在事先做好的观测点上进行精确的对中、整平;(2)用经过检定的钢尺进行对向多次量测,然后取均值,确定基线长度;(3)对中整平后将两台接收机天线上的指北标志同时指向正北。第一个测段两个天线都指北,观测一个时段(1h);然后固定天线G1不动,顺时针旋转另一个天线G2,依次旋转90°、180°、270°再测3个时段,每时段0.5h,这样就完成上半测回的数据采集;(4)下半测回先将两台机天线的指北标志同时指北观测一个测段(1h),之后,天线G2不动,G1天线依次旋转90°、180°、270°再测3个时段,各观测0.5h,就完成检测的数据采集。天线G1,G2如图1所示。
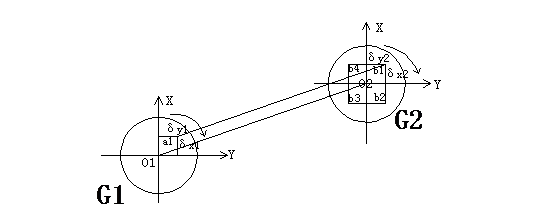
图1 天线相位中心偏差几何关系
在图1中,G1与G2分别是架设于临时设置的观测点的GNSS接收机天线。O1是天线G1的几何中心,O2是天线G2的几何中心。a1是天线G1的相位中心,a2是天线G2的相位中心。
2.2 数学模型与未知数解算
假设当两台天线都指北时天线G1的相位中心a1的坐标为 ![]() ,天线G2的相位中心b1的坐标为
,天线G2的相位中心b1的坐标为![]() 。则当天线G2顺时针旋转90°、180°、270°后,b1分别转到b2
。则当天线G2顺时针旋转90°、180°、270°后,b1分别转到b2![]() 、b3
、b3![]() 、b4
、b4![]() 。同理当天线G1顺时针旋转90°、 180°、 270°后,a1分别转到a1
。同理当天线G1顺时针旋转90°、 180°、 270°后,a1分别转到a1![]() 、a2
、a2![]() 、a3
、a3![]() 位置。从图1中可以根据几何关系来得出下列关系式(
位置。从图1中可以根据几何关系来得出下列关系式(![]() ,
,![]() 分别是基线几何中心的坐标差,
分别是基线几何中心的坐标差,![]() ,
,![]() 分别是第
分别是第![]() 条基线测量的
条基线测量的![]() 坐标差与
坐标差与![]() 坐标差),见表1。
坐标差),见表1。
表1 坐标差的相互关系式
|
G1指北,G2旋转 |
关系式 |
G1旋转,G2指北 |
|
|
N N |
|
N N |
|
|
N E |
|
E N |
|
|
N S |
|
S N |
|
|
N W |
|
W N |
|
本文利用几何关系和最小二乘法来计算天线相位中心偏差。
误差方程为:
![]() (1)
(1)
其中
![]()
组成法方程:![]() (2)
(2)
可解出未知量:![]()
(3)
以上介绍的是两点之间的相位中心偏差的检验,对于多台仪器一起检验时,就应该设定多个未知数,列立多个误差方程,然后进行联合平差,得出相应未知数的值,从而达到多台仪器检验的目的。
2.3天线相位中心偏离的扩展不确定度
根据标准不确定度B类评定方法,按下式计算合成不确定度:
![]() (4)
(4)
![]() (5)
(5)
式中:
![]() 、
、![]() —天线相位偏差检测的分量结果方差(
—天线相位偏差检测的分量结果方差(![]() 主对角线值)
主对角线值)
![]() —对中误差,(一般取0.1mm)
—对中误差,(一般取0.1mm)
![]() —GNSS测量本身的不确定度很小,可忽略
—GNSS测量本身的不确定度很小,可忽略
根据规范,天线相位中心分量偏离的扩展不确定度为:
![]() 方向的扩展不确定度:
方向的扩展不确定度:
![]()
![]() (6)
(6)
![]() 方向的扩展不确定度:
方向的扩展不确定度:
![]()
![]() (7)
(7)
包含因子![]() 的选择是基于结果表达所需的置信水平,一般
的选择是基于结果表达所需的置信水平,一般![]() 取值在2~3之间。当
取值在2~3之间。当![]() 时,置信区间为95%。
时,置信区间为95%。
3 接收机内部噪声检定方法
在无功分器的情况下,GNSS接收机的内部噪声水平也可以利用超短基线检验法代替零基线检验法。选择高度角15º以上无障碍物的超短基线两端安置天线,精确对中、整平,天线定向标志线指向正北,量取天线高;接收机同步观测1h;然后,再观测一个时段(1h);这两个时段一般是在检定天线相位中心的第一和第五两个时段中,接收机的天线方向均是指向北方向。用静态定位软件计算基线向量,两个时段站心坐标系基线分量及基线长度之差,即为接收机内部噪声水平,其值应小于生产厂商给出的精度指标。
数学模型如下:
 (8)
(8)
按下式计算内部噪声偏差分量![]() 以及内部噪声偏差
以及内部噪声偏差![]() :
:
![]()
![]()
![]()
![]() (9)
(9)
![]() 就是所要求的仪器内部噪声。
就是所要求的仪器内部噪声。
4 实验分析
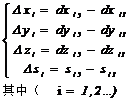
通过实地的踏勘和研究,决定将检定基线场布设为四边形,基线边边长约为2米,观测点间的高差平均在2厘米以内,其网形见(图2),检定基线场建立在广东工业大学大学城校区理学馆楼顶,该场地地面平整、四周视野开阔。检定基线场的观测点是自行制作。
笔者对四台某型号的 GNSS接收机(静态测量精度,平面:![]() ;高程:
;高程:![]() )分别进行了四次天线相位中心偏差检测和接收机内部噪声检测实验,四次实验都是独立进行,每次都重新布置检定基线场。相位中心偏差水平分量检定时,采用旋转角
)分别进行了四次天线相位中心偏差检测和接收机内部噪声检测实验,四次实验都是独立进行,每次都重新布置检定基线场。相位中心偏差水平分量检定时,采用旋转角![]() ,每个时段长度为0.5h。仪器高采用钢尺测前和测后各丈量3次,互差不超过2mm,取平均值作为最终结果。为了检测接收机的内部噪声和外符合精度,又用经检验的精密钢尺测量了各段短基线,分别对向各测6次取平均为最终结果。并利用尺长改正式对测得的结果进行改正。
,每个时段长度为0.5h。仪器高采用钢尺测前和测后各丈量3次,互差不超过2mm,取平均值作为最终结果。为了检测接收机的内部噪声和外符合精度,又用经检验的精密钢尺测量了各段短基线,分别对向各测6次取平均为最终结果。并利用尺长改正式对测得的结果进行改正。
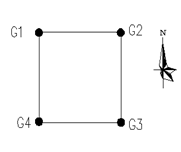
图2 网形设计图

图3现场观测图
表2 四次实验钢尺丈量各基线结果(改正后)/m
|
观测时间 |
G1-G2 |
G2-G3 |
G3-G4 |
G4-G1 |
|
一 |
2.0072 |
1.9565 |
2.0891 |
2.0039 |
|
二 |
1.9818 |
1.9968 |
1.8822 |
2.0184 |
|
三 |
2.1314 |
1.9968 |
2.0129 |
1.9963 |
|
四 |
2.0049 |
2.0514 |
1.8859 |
2.0186 |
依照以上所述原理编写了一个计算程序,计算时只需导入基线解算结果文件,程序自动进行计算并把结果输出。为了消除基线解算软件对检定结果的影响,笔者采用了中海达的HGO 后处理软件进行基线解算,并输出基线解算结果导入自己编写的程序进行后续的计算。表3所列的是采用HGO解算出来的基线算术平均值。
表3HGO解算的基线算术平均值/m
|
检测时间 |
G1-G2 |
G1-G4 |
G3-G2 |
G3-G4 |
|
一 |
2.0078±0.0020 |
2.0045±0.0018 |
1.9568±0.0017 |
2.0888±0.0008 |
|
二 |
1.9824±0.0018 |
2.0180±0.0024 |
1.9971±0.0020 |
1.8838±0.0021 |
|
三 |
2.1314±0.0014 |
1.9962±0.0022 |
1.9971±0.0026 |
2.0134±0.0013 |
|
四 |
2.0048±0.0019 |
2.0207±0.0040 |
2.0503±0.0021 |
1.8827±0.0023 |
从表3中可以看出解算出来的基线结果差异很小,同时将其与表1的丈量结果比较可见这四次GNSS基线测量的外符合精度也很高。
四台接收机的四次天线相位中心偏差的检测结果见表4、表5、表6和表7。
表4 GNSS接收机(G1)天线相位中心偏差检测结果/mm
|
观测时间 |
(考虑基线方差-协方差阵)HGO |
(未考虑基线方差-协方差阵)HGO | ||
|
|
δx |
δy |
δx |
δy |
|
一 |
1.5±0.2 |
0.1±0.2 |
1.8±0.3 |
-0.1±0.3 |
|
二 |
0.4±0.2 |
-0.2±0.2 |
-0.1±0.6 |
0.0±0.6 |
|
三 |
0.1±0.2 |
-0.3±0.2 |
-0.1±0.6 |
-0.2±0.6 |
|
四 |
-0.6±0.2 |
0.3±0.2 |
-0.2±0.5 |
0.2±0.5 |
表5 GNSS接收机(G2)天线相位中心偏差检测结果/mm
|
观测时间 |
(考虑基线方差-协方差阵)HGO |
(未考虑基线方差-协方差阵)HGO | ||
|
|
δx |
δy |
δx |
δy |
|
一 |
1.3±0.2 |
-1.3±0.2 |
1.3±0.3 |
-1.2±0.3 |
|
二 |
-0.4±0.2 |
0.1±0.2 |
-0.5±0.6 |
0.4±0.6 |
|
三 |
0.0±0.2 |
0.1±0.2 |
-0.2±0.6 |
-0.2±0.6 |
|
四 |
-0.5±0.2 |
0.3±0.2 |
-0.3±0.5 |
0.4±0.5 |
表6 GNSS接收机(G3)天线相位中心偏差检测结果/mm
|
观测时间 |
(考虑基线方差-协方差阵)HGO |
(未考虑基线方差-协方差阵)HGO | ||
|
|
δx |
δy |
δx |
δy |
|
一 |
1.3±0.2 |
-0.3±0.2 |
-1.2±0.3 |
-0.4±0.3 |
|
二 |
0.1±0.2 |
-0.9±0.2 |
0.4±0.6 |
-1.1±0.6 |
|
三 |
0.1±0.2 |
-0.7±0.2 |
-0.2±0.6 |
-0.7±0.6 |
|
四 |
0.3±0.2 |
-1.1±0.2 |
0.4±0.5 |
-1.2±0.5 |
表7 GNSS接收机(G4)天线相位中心偏差检测结果/mm
|
观测时间 |
(考虑基线方差-协方差阵)HGO |
(未考虑基线方差-协方差阵)HGO | ||
|
|
δx |
δy |
δx |
δy |
|
一 |
0.9±0.2 |
0.5±0.2 |
0.6±0.3 |
0.5±0.3 |
|
二 |
0.5±0.2 |
-0.8±0.2 |
0.8±0.6 |
-0.6±0.6 |
|
三 |
0.3±0.2 |
0.4±0.2 |
0.3±0.6 |
0.5±0.6 |
|
四 |
0.4±0.2 |
-0.6±0.2 |
0.4±0.5 |
-0.5±0.5 |
从表4、5、6、7中可以看出检测的四台GNSS接收机在四次检测实验中,天线的相位中心偏差水平分量都很小,而且四次实验结果比较吻合,均能满足仪器标称(平面:![]() ;高程:
;高程:![]() )精度指标。因此,在一般工程测量中,天线相位中心偏差的影响可以忽略。但对于精密工程测量和高精度定位测量,就必须考虑天线相位偏差的影响。
)精度指标。因此,在一般工程测量中,天线相位中心偏差的影响可以忽略。但对于精密工程测量和高精度定位测量,就必须考虑天线相位偏差的影响。
由于没有功分器,笔者利用超短基线检验法代替零基线检验法来检测GNSS接收机的内部噪声水平。实例如下:
表8 基线结果
|
点1 |
点2 |
DX(m) |
DY(m) |
DZ(m) |
SM(m) |
|
G1-N1 |
G2-N1 |
-0.0886 |
2.0059 |
0.001 |
2.0078 |
|
G1-N2 |
G2-N2 |
-0.0893 |
2.0063 |
0.0024 |
2.0083 |
|
G1-N1 |
G4-N1 |
-2.0004 |
-0.066 |
0.033 |
2.0017 |
|
G1-N2 |
G4-N2 |
-2.0015 |
-0.0666 |
0.032 |
2.0029 |
|
G3-N1 |
G2-N1 |
1.9566 |
-0.0162 |
-0.0333 |
1.9569 |
|
G3-N2 |
G2-N2 |
1.9569 |
-0.0156 |
-0.0296 |
1.9572 |
|
G3-N1 |
G4-N1 |
0.0445 |
-2.088 |
-0.0017 |
2.0885 |
|
G3-N2 |
G4-N2 |
0.0445 |
-2.0885 |
-0.0001 |
2.089 |
以上(表8)是笔者第一次实验检验的四台仪器的部分数据,这四台仪器分别放在G1、G2、G3、G4号检测点上,根据上面算法求得四台仪器的内部噪声如表9、表10、表11和表12:
表9 GNSS接收机(G1)的内部噪声
|
观测时间 |
△x(mm) |
△y(mm) |
△z(mm) |
△s(mm) |
|
一 |
-0.9 |
-0.1 |
0.2 |
0.85 |
|
二 |
-0.85 |
-0.35 |
-1 |
-0.1 |
|
三 |
0.05 |
-0.2 |
0.35 |
0.35 |
|
四 |
-0.05 |
0.00 |
0.45 |
0.9 |
|
观测时间 |
△x(mm) |
△y(mm) |
△z(mm) |
△s(mm) |
|
一 |
-0.2 |
0.5 |
2.55 |
0.4 |
|
二 |
-0.9 |
-0.15 |
0.65 |
-0.75 |
|
三 |
-0.15 |
0.4 |
1.7 |
0.2 |
|
四 |
0.5 |
0.5 |
0.4 |
-0.3 |
表11 GNSS接收机(G3)的内部噪声
|
观测时间 |
△x(mm) |
△y(mm) |
△z(mm) |
△s(mm) |
|
一 |
0.15 |
0.05 |
2.65 |
0.4 |
|
二 |
-0.45 |
1 |
2 |
-1.05 |
|
三 |
-0.25 |
1.25 |
0.95 |
-0.65 |
|
四 |
-0.85 |
1.05 |
0.05 |
-0.95 |
表12 GNSS接收机(G4)的内部噪声
|
观测时间 |
△x(mm) |
△y(mm) |
△z(mm) |
△s(mm) |
|
一 |
-0.55 |
-0.55 |
0.3 |
0.85 |
|
二 |
-0.4 |
0.8 |
0.35 |
-0.4 |
|
三 |
-0.05 |
0.65 |
-0.4 |
-0.5 |
|
四 |
-1.4 |
0.55 |
0.1 |
0.25 |
一般情况下内部噪声水平均低于2mm,但在这几次检测过程中我们发现,在用超短基线法代替零基线法检验时,偶尔会出现△x、△y、△z的值大于2mm的情况。但得到的接收机内部噪声水平满足生产商给出的精度指标。
5 结语
本文利用GNSS接收机天线相位中心的几何关系,通过自制简易检定场,利用相对定位法和超短基线法分别检测接收机天线的相位中心偏差和内部噪声水平。经实验证明,得出以下结论:
1.该方法具有较好的可靠性和精度
2.进行平差计算时考虑基线方差-协方差阵与否对结果影响不大,但对精度评定影响却很大,考虑基线方差-协方差阵能使不确定度大大降低。
3.该方法操作简便,适用于在野外对GNSS接收机天线相位中心偏差和内部噪声水平进行自检。
参考文献
[1] 国家测绘局.全球定位系统(GPS)测量型接收机检定规程(CH8016-95).北京:测绘出版社, 1995.
[2] 蔡宏翔. GPS接收机天线相位中心三维位置偏差野外测定方法[J]. 测绘技术装备,2000,03:23-25.
[3] 李征航. 三种不同层次的GPS接收机检验法[J]. 武测科技,1994,01:10-14+4.
[4] 郭金运,徐泮林,曲国庆. GPS接收机天线相位中心偏差的三维检定研究[J]. 武汉大学学报(信息科学版),2003,04:448-451.
[5] 李征航,黄劲松. GPS测量与数据处理[M].武汉大学出版社,2005-3.
[6] 武汉大学测绘学院测量平差学科组. 误差理论与测量平差基础[M]. 武汉大学出版社,2003-1.
[7] 刘大杰,施一民,等.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1996.
[8] 陈逸群,刘大杰. GPS接收机天线相位中心偏差的一种检定与计算方法[N].测绘通报,2000-2-1.
[9] 张健,张惠. GPS接收机检定方法的实验研究[J]. 计量与测试技术,2009,08:37-38.
[10] 戴水财,朱建军,张学庄,唐利民. GPS接收机内噪声水平的评价与检测方法[J]. 测绘科学,2007,05:17-20+200.
[11] 鲁雪松,陈义. GPS接收机噪声对天线相位中心检测的影响分析[J]. 测绘工程,2003,03:29-30.
[12] 翟清斌,齐维君. GPS天线相位中心变化及测试[J]. 测绘科学,2004,02:60-63+89.
