
高分辨率卫星遥感影像水体信息提取
1 引 言 水体信息的提取对于环境监测、水资源调查以及合理的规划利用等起着十分重要的作用。利用遥感影像提取水体的研究已有许多成果。如,徐涵秋对Mcfeeters的归一化差异水体指数(Normalized Difference Water Index,NDWI)[1]进行改进得到的改进归一...
- 作者:许书影, 乔 刚来源:2014测绘学|2015年02月04日
1 引 言
水体信息的提取对于环境监测、水资源调查以及合理的规划利用等起着十分重要的作用。利用遥感影像提取水体的研究已有许多成果。如,徐涵秋对Mcfeeters的归一化差异水体指数(Normalized Difference Water Index,NDWI)[1]进行改进得到的改进归一化差异水体指数(Modified NDWI,MNDWI),该方法能有效地避免水体与阴影的混淆[2];杨树文等针对细小水体的提取提出了多波段谱间关系的改进方法,也得到了很好的效果[3]。但这些研究多针对中低分辨率的遥感影像,且都需要影像具有较高的光谱分辨率。近年来,由于高分辨率卫星影像应用越来越广泛,相对于中低分辨率影像,这类影像的空间信息更加丰富、地物的几何和纹理信息更为清晰。采用传统基于像素的方法处理这类影像时,会因为粒度过小、过多地关注地物的局部细节而难以提取地物的整体信息。许多研究从分类精度、准确度等方面比较了基于像素与面向对象的影像分析方法。其中,Thomas等比较了监督分类、非监督分类和面向对象分类三种方法的分类精度[4]。Yu等[5]和苏伟[6]等研究结果表明:OBIA不仅可以有效克服传统基于像素方法中的“椒盐”噪声,且能有效提高分类的精度。
针对不同的研究对象和数据集特点,应该使用不同的影像分析方法。本文的研究对象是区域内的详细水体信息,包含大水体(湖泊、干流)以及细小水体(坑塘、细小支流),同时数据源为分辨率为0.712米的高分辨率遥感影像。因此,采用OBIA较为适宜。本文使用OBIA对QuickBird高分辨率遥感影像进行水体信息提取与分类。在对影像进行多尺度分割的基础上,利用影像对象的光谱、纹理、颜色和对象间关系等特征建立规则,实现了水体信息的提取;并与基于像素的提取结果进行了对比,分析了OBIA提取结果的精度。
2 研究区域与数据源
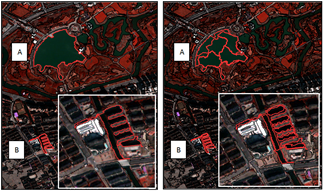
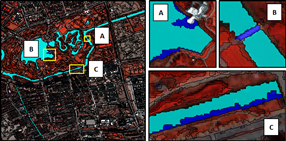
本文所用数据为采集于2004年5月5日10时28分18秒上海地区的QuickBird影像(即图1中较大的黑色边框区域),包括空间分辨率为0.717m的全色数据和2.87 m的多光谱数据,其中多光谱影像包含4个波段(红、绿、蓝和近红外)信息。并以上海市浦东新区作为研究区域(图1中较小的黑色边框区域)。该区域内河流、湖泊纵横交错,且有大小坑塘零星分布。土地利用类型以农田、水体以及居民地为主。研究区域对应的全色影像大小为13900像素×13900像素,多光谱影像为3475像素×3475像素,其代表地面大小约为10KM×10KM。

图1 QuickBird影像与研究区域示意图
3 面向对象的水体提取与分类
OBIA与基于像素的方法本质区别在于分析提取的主体是一系列具有某种一致性的像素组[7](即影像对象)而不是单个像素。OBIA可以挖掘对象本身以及对象与邻近对象、父对象、子对象的关系等特征,然后建立语义规则对高分辨率遥感影像进行水体信息的提取与分类。本文的水体信息提取流程如下图所示:
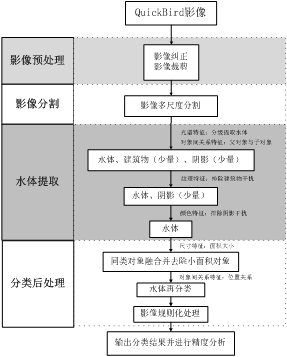
图2 水体信息提取流程图
3.1 影像的多尺度分割
OBIA建立在早期的分割、边缘检测、特征提取以及分类等概念的基础上的[8-12]。关键的一步就是产生影像对象,而影像对象是由影像分割产生的。所谓的影像分割是指:将影像按一定的规则分割成不同区域的过程。影像分割为我们提供了进行进一步影像分析的基础——影像预选对象[13]。此外,OBIA通过影像分割除了能提供光谱特征外,还能提供多种对象特征,如、纹理特征、形状特征、尺寸特征等。然而,其更大的优势在于可以提供额外的对象间的空间信息特征,即对象与对象间的位置关系、距离关系、拓扑关系等[14-15]。许多学者认为,这一点才是OBIA技术的关键和优势[16-18]。
本文使用的多尺度分割算法综合利用了遥感影像的光谱和形状特征,能够最大限度地减少影像对象内部的平均异质性,尽量提高对象内部的同质性;同时通过不同尺度分割产生多个影像对象层,将不同尺度的水体对象由其最适宜的尺度进行描述,有利于不同层次影像对象的信息传递和提取。在eCognition中,多尺度分割有三个参数:尺度参数(Scale)、颜色参数(Color)以及由光滑度(Smoothness)与紧致度(Compactness)构成的形状参数(Shape)。颜色与形状参数的取值范围是[0,1]。在形状参数的设置中,光滑度与紧致度的取值范围也是[0,1],且两者的和为1。尺度参数没有单位,它与影像的分辨率有关。表1中是本文中经过反复实验得出的不同影像对象层的分割参数设置。两个层次分割结果的局部放大图如图3所示。
表1 多尺度分割中的参数设置
|
影像层 (Level) |
尺度(Scale) |
颜色 (Color) |
形状 (Shape) |
形状参数设置 | |
|
光滑度(Smooth-ness) |
紧致度(Compactness) | ||||
|
Level 1 |
90 |
0.7 |
0.3 |
0.5 |
0.5 |
|
Level 2 |
30 |
0.7 |
0.3 |
0.4 |
0.6 |
(a) 大尺度(Level1) (b) 小尺度(Level2)
图3 QuickBird影像与研究区域示意图
图3(a)中红色边线图块A、B是Level1中的整块对象(父对象),它们在图3(b)Level2中是由对应区域的子对象构成的。其中A区域是大水体对象在Level1中表现比较完整而在Level2中支离破碎;B区域是小水体对象在Level1中因为尺度过大而遗漏,在Level2中可以将其分割出来。从中我们可以看出利用多层次的多尺度分割可以更好地描述不同尺度的水体对象,有利于后续的水体提取。
3.2 水体对象的提取
3.2.1 初步光谱及对象间关系特征分类
由多尺度分割得到了区域(对象),接下来需要通过一些水体对象的特征将其提取出来。第一步,利用光谱特征可以将大部分水体提取出来。常用方法有阈值法、差值法、密度分割法、色度判别法、谱间关系法以及比值法[19]。由于QuickBird影像的波段数较少,有些方法并不适用。已有很多研究表明[1,20],用归一化差异水体指数(Normalized Difference Water Index,NDWI)进行阈值分割可较精确地提取出水体信息。
![]() (1)
(1)
式中,![]() 为绿光波段;
为绿光波段;![]() 为近红外波段[19]。
为近红外波段[19]。
本研究中影像对象的NDWI值是取构成影像对象的所有像素NDWI值的均值,作为对象的光谱特征值。为确定了NDWI的分类阈值,从NDWI在Level1、Level2的取值区间中,都选择NDWI取值区间0.30~0.38并截取相应特征视图进行分析。
图4、5中均依据图例予以显示,其中彩色区域为大于阈值的对象而灰白区域为小于阈值的对象。两图子图中的红圈是将该图中遗漏的水体信息予以突显。图4中由于Level1的分割尺度过大,会产生一些地物混合的对象,如图4(a)、(b)、(c)三图的红圈区域存在许多细小水体与水边建筑物的混合地物对象;图5中由于Level2的分割尺度小,则不会出现这种情况。


图4 Level1中NDWI阈值分析图 图5 Level2中NDWI阈值分析图
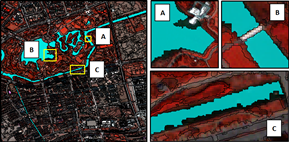
本文中初步分类还利用了对象间的关系特征,具体过程如下:第一步:在父对象层(Level1)中,按NDWI分类阈值0.33提取水体对象;第二步:将Level1的提取结果利用父对象与子对象间的隶属关系传递到Level2中;第三步:在子对象层(Level2)中也利用NDWI提取水体对象。经过以上三步(图6)就完成了水体对象的初步提取。
与仅从某一层次提取结果相比,该方法可以将所有水体对象完整地提取出来。如图7(a)是仅在Level1中提取的结果,虽然可以防止大水体对象支离破碎(如图7(a)中A、B区域),但是会遗漏小水体对象(如图7(a)中C区域);图7(b)是仅在Level2中提取的结果,虽然可以防止遗漏小水体对象(如图8(b)中C区域),但是会使大水体对象支离破碎(如图8(b)中A、B区域);而使用本文中介绍的方法既不会因为尺度过大而遗漏小水体对象(如图8(c)中A、B区域);也不会因为尺度过小,而使大水体对象支离破碎(如图8(c)中C区域),而且保证了提取水体的全面性和完整性。

(a) 第一步 (b) 第二步 (c) 第三步
图6 利用NDWI进行水体提取的过程

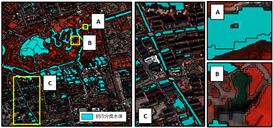
(a) 在Level1中仅利用光谱特征提取水体结果图 (b) 在Level2中仅利用光谱特征提取水体结果图
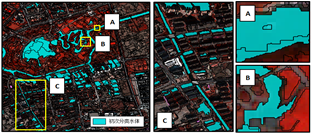
(c) 利用光谱及对象间关系特征多层次提取水体结果图
图7 多种水体提取过程对比图
然而仅仅利用光谱特征进行水体提取,会将部分与水体光谱特征相似的建筑物及其阴影包含进来(如图8,虽被分类为水体,而实际上是建筑物及其阴影),产生误判,即常见的“同谱异物”现象。因此,需要利用影像对象的其它特征将干扰排除。
3.2.2 纹理特征分类
由于遥感影像中“同物异谱”和“异物同谱”的现象经常出现,仅依靠光谱特征常不足以准确提取目标对象。QuickBird影像分辨率高,地物的细微结构能够得到清晰的反映,纹理及颜色信息丰富。因此,为了排除建筑物及其阴影的干扰,首先在光谱特征提取的基础上,利用建筑物与水体的纹理差异,排除一部分建筑物及其阴影的干扰;然后将影像转变到HIS颜色空间,利用阴影区域亮度值低而饱和度高的特征[20]将剩余阴影的干扰排除。
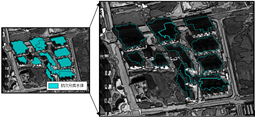
图8 因为建筑物及其阴影与水体光谱特征相似而被误判为水体
如上图7、8所示,在QuickBird影像中水体和纯阴影对象的纹理,均比较细致均一;而建筑物及其与阴影混合对象的纹理,在多光谱波段中呈明暗交错的条带状,不规则且相对比较粗糙,易于区分。本文使用灰度共生矩阵(Gray Level Co-occurrence Matrix,GLCM)[21] 来描述影像各像元灰度的空间分布和结构特征,即对象的纹理特征。
设![]() 为一幅二维数字图象,其大小为
为一幅二维数字图象,其大小为![]() ,灰度级别为
,灰度级别为![]() ,则满足一定空间关系的灰度共生矩阵为:
,则满足一定空间关系的灰度共生矩阵为:
![]() (2)
(2)
其中![]() 为
为![]() 阶的矩阵,
阶的矩阵,![]() 表示集合
表示集合![]() 中的元素个数。若
中的元素个数。若![]() 与
与![]() 距离为
距离为![]() ,两者与坐标横轴的夹角为
,两者与坐标横轴的夹角为![]() ,则可以得到各种间距及角度的灰度共生矩阵
,则可以得到各种间距及角度的灰度共生矩阵![]() 。它不仅反映亮度的分布特性,也反映具有同样亮度或相近亮度的像素之间的位置分布特性,是有关图像亮度变化的二阶统计特征,是定义一组纹理特征的基础。为了能更直观地描述纹理状况,Haralick等人在灰度共生矩阵的基础上,定义了若干较为常用的纹理量,如:能量、对比度、熵、相关性、均质性等等[22]。
。它不仅反映亮度的分布特性,也反映具有同样亮度或相近亮度的像素之间的位置分布特性,是有关图像亮度变化的二阶统计特征,是定义一组纹理特征的基础。为了能更直观地描述纹理状况,Haralick等人在灰度共生矩阵的基础上,定义了若干较为常用的纹理量,如:能量、对比度、熵、相关性、均质性等等[22]。
为了确定使用哪个纹理量分类,从初步分类为水体的对象中选取一系列对象(水体、阴影、建筑物与阴影混合三类)作为样本。查看、分析与比较了不同类别对象在不同纹理特征上的表现,选取能量与熵进行进一步的水体分类提取,这两者均与对象纹理的均匀程度有关。为了扩大表现水体与其它类型对象在纹理均匀性方面的差异,本文提出采用归一化差异纹理均匀性指数(Normalized Difference Textural Uniformity Index,NDTUI)计算对象纹理的均匀性。
![]() (3)
(3)
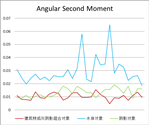
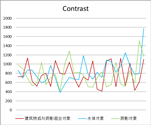
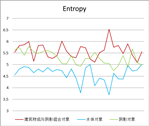
(a) 能量 (b) 对比度 (c) 熵
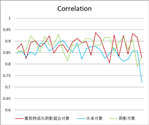

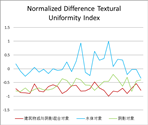
(d) 相关性 (e) 均质性 (f) 归一化差异纹理均匀度指数
图9 不同类别对象的各种纹理特征图
如图9中的子图(f)所示。并取阈值-0.35二次分类结果如图10所示,A处将水体误判为建筑物或及阴影是由于处于水陆的交界处,除了地物光谱的复杂性外还有遥感影像的分辨率的限制形成了一些混合对象。我们将在后续的分类后处理中,利用平滑与规则化处理将其正确分类;而B处仍有少量阴影对象的干扰。因此,仍需要利用阴影的其它特征将其排除。
3.2.3颜色特征分类
剩余少量阴影对象的排除是通过影像上阴影的颜色特征来实现的。先将遥感影像由RGB颜色空间转换到HIS颜色空间 [23]。相对于遥感影像中的其他区域(水体对象),阴影区域在HIS颜色空间具有亮度值低、饱和度高的特点[20]。在HIS颜色空间中,对S分量和I分量作归一化比值运算:
r=(S—I)/(S+I) (4)
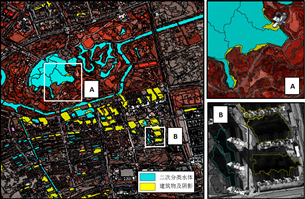

图10 利用纹理特征的水体提取结果图 图11 利用颜色特征的水体提取结果图
三次颜色分类结果图如图11所示,还存在一些面积很小的阴影误判的对象,可在后续的分类后处理中将这些小对象统一去除掉,得到纯度较高的水体对象。
3.2.4 分类后处理
(1) 同类对象融合与去除小面积水体对象
为了排除一些小面积对象的误判。首先,对水体对象进行融合形成整块的对象,然后将面积小于1000pxl的对象去除,得到的结果如图12(a)所示。
(2) 利用对象类别间的位置关系再次分类
由于地物光谱的复杂性及遥感影像的分辨率的限制,使得处于水陆交界处的水体对象有漏分的情况;另外,水面上的桥梁使得水体对象有分段现象,为了尽可能地使水体完整,也应该将这些桥梁归为水体类。故使用对象类别间的位置关系,即与水体共有边界达50%以上的对象也归为水体类。得到的结果如图16(b)所示,A、C处为遗漏水体;B处为桥梁。并将这些得到的对象再归为水体类并与现有水体对象融合。
(a)去除小面积对象得到的结果图 (b)利用对象间关系再次分类的结果图
图12 分类后处理
(3) 规则化处理提取结果
由以上步骤提取得到的水体结果,存在以下不规则的情况,如图13所示。这些情况与实际的水体边界情况并不相符。另外,受影像分辨率的限制,提取出的水体对象呈明显的锯齿状且存在一些凹陷与突起部分,如图13(a)。因此需要对提取的水体对象进行规则化处理。规则化处理主要包括对象的生长与收缩两个部分。生长是为填补凹陷,收缩是为去除突起部分,如图13(b)。规则化处理使用的是矩阵来对目标对象的边界进行处理。通过计算矩阵内目标对象像素所占的百分率,并与设定的生长或收缩阈值比较,来决定该目标像素是保持原有类别,还是被分为其它类别(图14)。
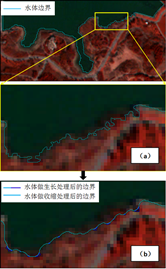

图13 局部水体轮廓图 图14 生长与收缩算法原理示意图
经过规则化处理的水体提取结果, 填补了凹陷,去除了突起部分,使得水体边界平滑。最后,将最终提取结果分别输出为矢量和栅格图像(如图15),以便后续的处理与应用。
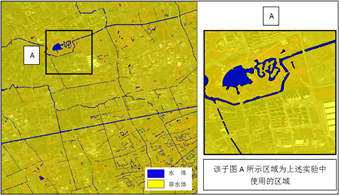
图15 水体提取结果图
4 精度评定与总结
为了对提取结果进行评价,在研究区域内随机选取了1024个样本,建立混淆矩阵并计算各类精度。同时将其与基于像素的最大似然法监督分类和最小马式距离监督分类的提取结果进行对比分析(如图16所示为研究区域的局部提取结果图)。从精度分析(表2)中可以看出OBIA在分类总精度以及Kappa系数上都优于另外两种方法,且可以有效地避免基于像素方法产生的“椒盐”噪声的影响。
表2 不同提取方法的精度评价
|
分类方法 |
最小距离法监督分类 |
最大似然法监督分类 |
面向对象分类 |
|
总体精度 |
80.9% |
91.0% |
96.6% |
|
Kappa系数 |
0.4799 |
0.7310 |
0.9426 |
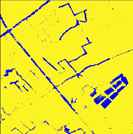


(a) 最小距离法监督分类 (b) 最大似然法监督分类 (c) OBIA
图16 不同分类方法的水体提取结果局部图
经检验发现,OBIA的误判像元主要处于水陆的交界处。造成这种误判,除了地物光谱的复杂性外还有遥感影像的分辨率的限制。从以上研究中可以得出以下结论:
(1) OBIA以影像对象作为分类的最小单元,可以灵活运用地物本身的光谱、结构、纹理、形状尺度以及地物间相互关系等信息来构建分类规则集,提高分类精度;
(2) OBIA的精度较传统基于像素的分类方法有了很大的提高,并且分类的结果可以消除由于光谱的细微差异或混合像元造成的细小碎斑,有效地抑制“椒盐”噪声。
参考文献
[1]McFeeters SK. 1996. The Use of The Normalized Difference Water Index (NDWI) In The Delineation of Open Water Features. International Journal of Reomte Sensing[J], 17(7): 1425-1432
[2] 徐涵秋. 2005. 利用改进的归一化差异水体指数(MNDWI)提取水体信息的研究. 遥感学报[J], 9(5):589-595
[3] 杨树文, 薛重生, 刘涛, 李轶鲲. 2010. 一种利用TM影像自动提取细小水体的方法. 测绘学报[J], 39(6):611-617
[4] Thomas N, Hendrix C, Congalton RG. 2003. A Comparison of Urban Mapping Methods Using High-resolution Digital Imagery. Photogrammetric Engineering & Remote Sensing[J], 69(9):963-972
[5] Yu QP, Chinton N, Biging G, Kelly M, Schirokauer D. 2006. Object-based Detailed Vegetation Classification With Airborne High Spatial Resolution Remote Sensing Imagery. Photogrammertric Engineering & Remote Sensing[J], 72(7):799-811
[6] 苏伟, 李京, 陈云浩, 张锦水, 胡德勇, 刘翠敏. 2007. 基于多尺度影像分割的面向对象城市土地覆被分类研究———以马来西亚吉隆坡市城市中心区为例. 遥感学报[J], 11(4):521-529
[7] Blaschke T. 2010. Object Based Image Analysis for Remote Sensing. ISPRS Journal of Photogrammetry and Remote Sensing[J], 65(2010):2-16
[8]Kettig R, Landgrebe D. 1976. Classification of Multispectral Image Data by Extraction and Classification of Homogeneous Objects. IEEE Transactions on Geoscience Electronics[J], GE-14(1):19-26
[9] Haralick RM. 1983. Decision Making in Context. IEEE Transactions on Pattern Analysis and Machine Intelligence[J], 5(4):417-428
[10Lobo A, Chick O, Casterad A. 1996. Classification of Mediterranean Crops with Multisensor Data: Per-pixel versus Per-object Statistics and Image Segmentation. International Journal of Remote Sensing[J], 17(12):2385-2400
[11] Aplin P, Atkinson PM, Curran PJ. 1999. Fine Spatial Resolution Simulated Satellite Sensor Imagery for Land Cover Mapping in the United Kingdom. Remote Sensing of Environment[J], 68(3):206-216
[12] Baltsavias EP. 2004. Object Extraction and Revision by Image Analysis Using Existing Geodata and Knowledge: Current Status and Steps towards Operational Systems. ISPRS Journal of Photogrammetry and Remote Sensing[J], 58(3-4):129-151
[13] 刘建华, 毛政元. 2009. 高空间分辨率遥感影像分割方法研究综述. 遥感信息[J], 6:95-101
[14] Benz UC, Hofmann P, Willhauck G, Lingenfelder I, Heynen M. 2004. Multi-resolution, Object-oriented Fuzzy Analysis of Remote Sensing Data for GIS-ready Information. ISPRS Journal of Photogrammetry and Remote Sensing[J], 58(3-4):239-258
[15] Van der Werff HMA, Van der Meer FD. 2008. Shape-based Classification of Spectrally Identical Objects. ISPRS Journal of Photogrammetry and Remote Sensing[J], 63(2):251-258
[16] Hay GJ, Blaschke T, Marceau DJ, Bouchard A. 2003. A Comparison of Three Image-object Methods for the Multiscale Analysis of Landscape Structure. ISPRS Journal of Photogrammetry and Remote Sensing[J], 57(5-6):327-345
[17] Conchedda G, Durieux L, Mayaux P. 2008. An Object-based Method for Mapping and Change Analysis in Mangrove Ecosystems. ISPRS Journal of Photogrammetery & Remote Sensing[J], 63(5):578-589
[18] Wuest B, Zhang Y. 2009. Region Based Segmentation of QuickBird Multispectral Imagery Through Band Ratios and Fuzzy Comparison. ISPRS Journal of Photogrammetry and Remote Sensing[J], 64(1):55-64
[19] 张继贤, 乔平林. 2005 水资源环境遥感监测与评价[M]. 北京: 测绘出版社: 20-28
[20] 杨俊, 赵忠明, 杨健. 2008. 一种高分辨率遥感影像阴影去除方法. 武汉大学学报(信息科学版) [J], 33(1):17-20.
[21] Robert M, Haralick K, Shanmugam Its'Hak Dinstein. 1973. Textural Features for Image Classification. IEEE Transactions On Systems, Man, and Cybernetics[J], SMC-3(6):610-621.
[22] Robert M, Haralick K. 1979. Statistical and Structural Approaches to Texture. Proceedings of the IEEE[J], 67(5):786-804.
Rafael C Gonzalez, 等. 2004. 数字图像处理(第二版)[M].北京: 电子工业出版社: 235-23
