 RSS订阅
RSS订阅1 引言
数字高程模型(Digital Elevation Model),简称DEM,是用一组有序数值阵列形式表示地面高程的一种实体地面模型,是数字地形模型(Digital Terrain Model,简称DTM)的一个分支,其它各种地形特征值均可由此派生。DEM的获取方法通常有三种:摄影测量法、激光法和干涉雷达法。摄影测量方法获取DEM是利用航空摄影获取影像通过解析空中三角测量方法构建立体影像进行数据采集,从而获取DEM。利用机载激光雷达(LIDAR,即Light Detection and Ranging)获取DEM是利用航空激光扫描系统,采用直接、主动测距的方式,获取DEM[1]。干涉雷达法生成DEM是利用合成孔径雷达进行干涉测量,从而获取DEM数据的另一种方法手段[2]。
采用传统摄影测量方法获取高精度DEM数据,虽精度较高,但费时费力,工作量巨大,采用雷达点云方式生成DEM自动化程度较高,但需要投入专业设备获取点云数据,数据获取成本较高,如何将两种方法的优点进行结合,利用航摄资料尽可能自动化地快速生成DEM数据是一个值得探索的方向。本文针对利用航摄资料生成模拟雷达点云数据,生成高精度DEM的方法进行探讨。
2 技术方法
影像匹配即通过一定的匹配算法在两幅或多幅影像之间识别同名点的过程,也有人称影像匹配为影像相关。影像相关是利用互相关函数,评价两块影像的相似性以确定同名点。即以影像信号分部最相似的区域为同名区域,同名区域的中心点为同名点。常见的基于像方灰度的影像匹配算法有相关函数法、协方差函数法、相关系数法、差平方和法、差绝对值和法、最小二乘法等,另外还有基于像方特征的跨接法影像匹配,金字塔多级影像匹配,SIFT等。利用航摄资料生产点云数据实质就是对立体像对进行逐像元匹配,生成每个像元的空间三维坐标点,组成点云集合。式2-1较为常用的“基于灰度差平方和最小”的最小二乘法匹配算法原理表述[3]:
其中v为灰度差,vv为灰度差平方和,g1和g2为影像灰度分布阵列,x,y为匹配点的行列号。
通过雷达或立体相对匹配所获取的点云数据,不仅包括地面点数据,也包括落于地面上的其他人工营造物上的点云数据,如建筑物、植被、汽车等。所以还需利用一定的算法对这些人工营造物的点云,从而使点云数据分为地面点和非地面点数据。目前,主要的滤波算法主要有数学形态学法、移动窗口滤波法、迭代线性最小二乘内插法、基于地形坡度法。
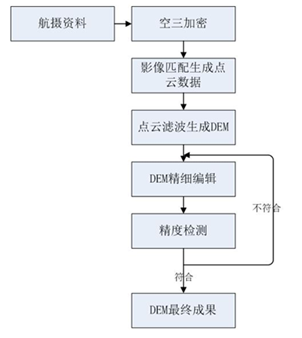
利用航空摄影资料进行空三加密,以影像匹配算法为手段,进行高密度点匹配,形成类雷达点云;以类雷达点云数据为基础,进行点云滤波,将植被、建筑物等人造地物进行过滤,形成纯地面点数据;将地面点数据进行离散栅格化,形成初步DEM数据,对生成的DEM数据进行精细编辑和精度检测,通过精度检测的数据为最终DEM数据,没有通过精度检测的数据需要进一步修改,直至达到精度指标。
3 应用分析
采用2010年10月和2011年5月间完成的乌鲁木齐市及周边区域高分辨率航摄数据,地面分辨率优于0.1m。利用自检校光约束法进行解析空三加密,加密精度指标:检查点中误差平面小于0.08m,高程小于0.12m。
采用已有的乌鲁木齐市建成区及其周边地区的1:500、1:1000、1:2000大比例尺地形图,用于DEM精度检验。
项目共选择了四个实验区,分别为高密度的建成区A,具有高密度高植被丘陵山体区B,植被稀少或具有低矮灌木的丘陵山区C和建筑物稀少的空阔建成区D。
项目的解析空三加密成果资料为软件ORIMA和ERDAS LPS的加密格式,采用ERDAS LPS方式进行类雷达点云数据生产,生产模块为LPS EATE模块,在EATE中设置好匹配策略和输出参数后进行运算。
在点云数据生成后,将类雷达点云数据进行滤波,将点云中的错误点(一般称为低点)、非地形点(落于建筑物上、树上及其他非地形地貌)按一定算法分离、过滤、删除,提取真正的地形点,利用这些地形点生成地形数据,即DEM数据。具体操作是在E3DE中进行,打开点云数据,设置好过滤参数(最小构建筑面积、最大构建筑物面积、高度、植被高度、过滤坡度等),进行过滤,生成DEM数据。
经E3DE滤波后生成的DEM数据,由于算法和参数设置缺陷等原因,许多非地形点和错误点并未完全过滤掉,尤其是在建筑密集区、大片色彩单一的建(构)筑物等区域,因此,需要进一步对DEM进行少量的人工参与的修编工作,具体操作是在QTModeler(Quik Terrain Modeler)软件中编辑完成。
对编辑完成的DEM进行拼接和镶嵌处理,生成实验区完整的DEM数据。
DEM的精度常用的精度评定方法有检查点法、剖面法、等高线法、影像分析法等,其中检查点法简单易行,是最常用的方法[6]。
按照国家相关标准规定,DEM精度分为A(一级)、B(二级)、C(三级)三个等级,精度最高一级比例尺1:500的DEM,根据地形不同精度要求为0.2-0.7米,比例尺1:1000的DEM根据地形不同精度要求为0.5-1.5米[5],而依据地形图精度相关标准规定:1:500地形图比例尺高程中误差为0.15m――0.5m(平地为0.15m、丘陵地为0.4m、山地为0.5m),1:1000高程中误差为0.15m――0.7m(平地为0.15-0.4m、丘陵地为0.5m、山地为0.7m)[5],因此使用1:500、1:1000地形图数据提取的高程点可以作为DEM数据精度评价依据。
分别在四个实验区各选取40-70个高程点与DEM数据比较,进行精度验证。验证结果如表1所示:
|
实验区 |
中误差(RMSE,单位:米) |
|
A(高密度的建成区) |
0.249148 |
|
B(高密度高植被丘陵山体) |
0.364044 |
|
C(低矮灌木的丘陵山区) |
0.259273 |
|
D(建筑物稀少的空阔建成区) |
0.337545 |
|
|

3.5质量评价
通过对精度数据的分析可知:
(1)从检查点的中误差大小看,利用数码航摄资料生产的DEM资料,其精度满足1:1000比例尺地形图一类地区和1:500比例尺地形图三类地区的精度。
(2)通过精度验证发现,中误差最大的区域为实验区B,中误差为0.364044,最小的区域为实验区A,中误差为0.249148,其余两个区域中误差介于两者之间。从误差分布和离散情况看,摄影测量方法生产DEM的精度指标并未表现出与地形相关的特性,平坦区域和地形起伏区域并未有明显的误差离散差别。
(3)从残差点离散图看,实验区B、实验区C的残差离散程度较为集中,实验区A和实验区D的残差离散程度较大,说明建构筑物对该方法生产DEM在精度上有影响,而两者相比,实验区A比实验区D散程度上略显集中,通过对云数据分析发现,残差较大的点多数集中在大型厂房及大的单体建(构)筑物覆盖区域,其原因在于这些大型厂房和单体建筑的屋顶上都为单调白色、红色或蓝色,大面积的单调色彩区域不利于影像匹配阶段的同名点匹配运算,导致匹配点剧烈抖动,形成塌陷区或剧烈突变区。
(4)实验区B和实验区D的离散图相比,实验区B的残差实验区D的散列程度稍集中,这可能是因为在实验区B的树木植被更加高大,在点云滤波阶段更容易滤除(在点云滤波阶段需要设置滤除植被的最大高度、最小高度、坡度等信息),而低矮灌木不容易滤除引起,同时在实验区D,DEM残差大部分分布为正,这从另一个角度佐证了低矮灌木较高大树木更难滤除这一特征。
4结论
通过基于影像匹配和点云滤波方法相结合,利用数码航摄资料开展构建DEM方法的研究,经过应用分析和精度验证,主要结论是:
(1)、基于影像匹配和点云滤波原理,采用合理的技术方法,可以快速生产精度较高的DEM数据,其精度满足1:1000比例尺地形图一类地区和1:500比例尺地形图三类地区DEM的精度要求。
(2)、利用摄影测量方法生产DEM,其精度受诸多因素影响。在植被方面,低矮灌木比高大树木的影响更大;在建筑物和建筑密度方面,大型厂房等具有单调均一色彩顶面的建筑对精度影响较大。
参考文献:
[1]李卉,李德仁,黄先锋等. 一种渐进加密三角网LIDAR点云滤波的改进算法. [J].测绘科学,2009(5):39-40
[2]李永荣、张继贤、黄满国等. 用星载合成孔径雷达( SAR)立体影像生成DEM的方法研究[J].测绘科学,2005(6):28-29.
[3]张祖勋、张剑清. 数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996.:175-186.
[4]CH/T 9008.2-2010,基础地理信息数字成果 1:500 1:1000 1:2000 数字高程模型[S]
[5]CH/T 9008.2-2010,基础地理信息数字成果 1:500 1:1000 1:2000 数字线画图[S]
[6]马素颜.基于高分辨率卫星遥感数据提取DEM研究[D].上海:华东师范大学,2009
作者简介:
李宝明:2010年毕业于中国科学院研究生院新疆生态地理研究所地理信息专业,工程师,就职于乌鲁木齐市城市勘察测绘院,主要从事地理信息、摄影测量方面工作。
龙海奎:1987年毕业于武汉测绘科技大学, 提高待遇高级工程师,就职于乌鲁木齐市城市勘察测绘院,主要从事测绘地理信息技术管理工作。

