 RSS订阅
RSS订阅1 引言
由于文物具有轮廓复杂、不易接触和纹理丰富的特点,因此如何迅速而准确获取文物的数字表面模型成为一个关键问题。考虑到珍贵文物自身的特点,大部分文物都不可以直接触摸,并且对文物的无损检测精度一般要求都较高,这两个要求大大增加了珍贵文物的三维重建难度。目前,国内外非接触式的三维信息采集技术主要有四种:第三代工业CT扫描、三维激光扫描、结构光扫描和近景摄影测量。相对于其他三维信息采集技术,近景摄影测量技术以其较小的数据量、快捷的处理、低廉的成本以及高精度的特点在文物三维重建方面表现出不可比拟的优势。本文以兵马俑三维模型重建为例,研究了一种简捷可行的数字近景摄影测量方法,用非量测型普通数码相机对文物摄影获取其数字影像,用PhotoModeler Scanner软件依据近景摄影测量原理生成其三维模型,并实现了文物模型在三维虚拟场景中的漫游和量测功能。
2技术路线
本文以兵马俑三维重建为例,用定焦单反数码相机对其进行数据采集,选用近景摄影测量软件 PhotoModeler Scanner 完成文物的三维重建。PhotoModeler软件融合“摄影测绘”和“三维建模”这两个工作环节,通过基于纹理的影像匹配算法对编码点进行识别匹配和相对定向,利用近景摄影测量的多基线影像匹配和光束法平差原理进行数据处理,得到文物点
云数据,点云数据经三角网构面后得到文物表面白模,通过纹理映射构建物体真实三维模型,并实现文物模型在Skyline平台虚拟场景中的漫游与量测功能。技术路线如图2.1所示。
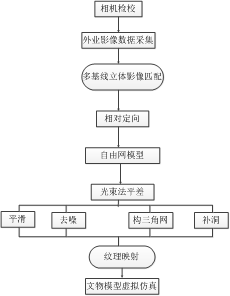
图2.1技术路线
3 关键技术
3.1 基于二维平面格网的相机检校
将普通数码相机用于摄影测量时,首先对相机进行校验,获取相机的内方位元素数据,以及消除由光学误差、电学误差和机械误差所产生的畸变[1]。PhotoModeler Scanner软件采用二维检校板,如图3.1所示,该检校板共包括140个无编码标识点和4个编码标识点,这些标识点可自动识别和匹配,其具有唯一身份。
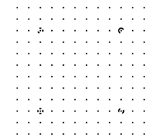
图3.1 二维检校板
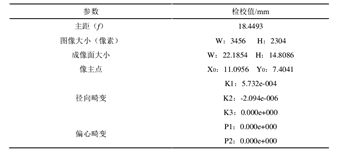
保持二维检校板与相机主透镜光轴之间大致呈45度,在室内分4个方向拍摄8张检校板像片,每个方向拍摄2张,其中1张逆时针转90度进行拍摄。为保证检校结果的精确性,获取的影像至少要充满像幅的80%,保证4个作为控制点的编码标识点的清晰度,使其能被成功自动识别。将8张影像按拍摄的方位有规律的排列,导入软件的检校模块作数学解算后,完成相机的室内检校,得到下表3.2的校验数据。
3.2 多基线影像匹配
多基线影像匹配实质上是在相邻两幅或多幅影像之间识别同名点,目的是提取物体的几何信息,确定其空间位置。该匹配技术特点是:短基线的拍摄方式使得影像变形较小,有利于自动化匹配的顺利进行;相邻相片的同名点匹配传递可获取具有多度重叠的同名点[2-3]。
3.3光束法平差
光束法平差的数学模型是共线条件方程,平差单元是单个光束,它把每幅影像的像点坐标视为原始观测值,把各影像的外方位元素和所有待求点坐标视为未知数,通过各个光束在空间的旋转和平移使同名光线最佳交会[4-5]。光束法平差的误差方程式直接对原始观测值列出,能最方便的顾忌影像系统误差的影响,它是进行相机标定和测量的最严密解法。
3.4切平面投影三角构网
平差后得到文物的点云数据仍会存在着较大的噪声,如果直接基于初始点云重构文
物表面,得到的文物表面将坑洼不平,因此点云需要进一步经过平滑、去噪后才可使用。所以使用编辑工具删除模型中的噪声点,然后通过Smooth工具进行平滑处理。采用切面投影三角构网法对文物点云进行三角化,该算法利用渐进式的三角剖分技术,通过将每个数据点的邻近点投影到切平面上来计算每个数据点的Delaunay邻域。在三角化的同时进行填补得到完整的文物表面模型,将三角网转换成面后得到文物三维白模。
3.5纹理映射
纹理映射算法的实现步骤归纳为两步:第一步求得纹理空间参数与对象空间坐标之间的对应关系;第二步通过对象空间坐标与屏幕空间之间关系的计算最终确定纹理空间与屏幕空间的映射关系。该纹理映射方法,可以解决自由曲面纹理映射的难题,使纹理映射更加符合人的视觉效果。在得到文物的三维白模基础上完成纹理映射,得到最终的建模结果。
4 三维模型制作和仿真漫游
4.1 兵马俑模型制作
本研究按照以上路线对兵马俑三维模型进行了重建,采用一条环绕摄影路线完成对兵马俑数据的采集。将影像数据导入 PhotoModele Scanner 软件中,通过多基线影像匹配技术获取同名点之后,由相邻影像组成立体像对,对于每个立体像对,利用同名点的信息进行相对定向;在立体像对之间根据共同的同名点进行模型连接,建立自由网模型,获取三维点云数据。如图 1 所示。
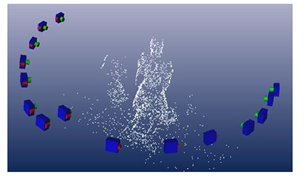
1 环绕摄影和三维点云数据生成
由于误差积累等原因,相对定向解求的模型点坐标精度不高。因此,需在此基础上建立区域网,利用共线方程联合所有像片、像点进行自由网光束法平差解算,平差后就得到物体表面的点云数据和各影像的外方位元素。通过Smooth工具对点云数据进行平滑处理后,得到图2的结果。采用切面投影三角构网法对点云数据进行三角化处理,在三角化的同时进行补洞,处理完成后得到完整的兵马俑模型,如图3所示。
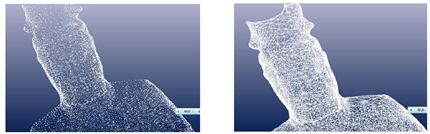
2平滑后的点云数据 3构三角网后的结果
兵马俑表面模型生成后对其进行纹理映射后得到其重建的最终结果,如图 4.3 所示。

4 纹理映射后的三维模型
4.2文物模型虚拟仿真
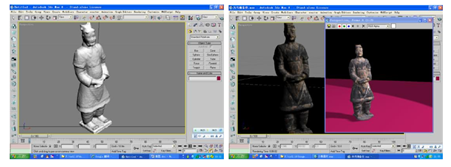
在 PhotoModeler Scanner 软件平台上对兵马俑进行三维重建,用 3dsMax做为格式转换软件完成模型输出,最终在Skyline虚拟仿真平台下进行三维展示,实现文物模型的虚拟仿真[6-7]。具体过程如下:
(1)PhotoModeler Scanner软件可以以dxf、wrl.raw、kmz、obj等多种格式导出模型,本研究将重建的文物模型导出为主流三维软件都可支持的obj格式。
(2)在3dsMax中导入obj格式,导入后的三维白模显示如图5所示,在3DMAX软件中完成材质贴图的重新拾取,添加灯光后渲染效果如图6所示,将模型文件坐标归零导出为以.x为文件扩展名的文件。
(3)利用3DMAX导出插件将.X文件格式数据转换成Skyline.xpl2格式后导入,调整其在场景中的位置,如图7所示。这样就完成了三维模型的整个输出过程,在Skyline平台下可对文物进行量测和漫游。
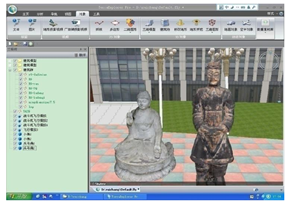
7三维仿真和漫游
5 结束语
本文研究了一种用非量测数码相机获取文物序列影像数据,基于数字近景摄影测量软件PhotoModeler Scanner进行文物三维建模的方法。这种文物建模方法具有成本低,质量高,使用简单等优点。该研究利用近景摄影测量的基于纹理的多基线影像匹配算法和光束法平差原理进行数据处理,得到文物点云数据,点云数据经构建不规则三角网后构面得到文物三维模型,最后通过纹理映射后得到文物的三维真实模型,并实现了文物模型在Skyline平台中的漫游与量测功能。
参考文献
[1]詹总谦.基于纯平液晶显示器的相机标定方法与应用研究[D].武汉:武汉大学,2005.12~13
|
[2] 来春风.数字近景影像稠密匹配方法研究[D].南京:南京师范大学,2012.10~14 |
|
[3]沈映泉.基于文物三维模型的考古绘图自动绘制方法研究与实现[D]:西安:西北大学, |
|
2011. 25~28 |
|
[4]苏毅,曾坚. PhotoModeler 软件在复杂曲面形建筑设计中的应用[J].天津:天津大 |
|
学建筑学院.2010. 8~15 [5]佟书泉,王东等.基于2维DLT方法的普通数码相机检校[J].测绘通报.2007.20~22 [6]冯文灏.近景摄影测量[M]. 武汉:武汉大学出版社,2001 .60~67 [7]王向前.基于Skyline的黑河流域地形三维可视化技术研究与实现[D].兰州:兰州大学,2010.35~40 |
作者简介:赵国梁(1976赵国梁(1976-),男,河南新野人 西安科技大学测绘学院,讲师,博士。研究方向:摄影测量与三维地理信息系统。基金资助项目:国家自然科学基金项目(40572155)现代工程测量国家测绘局重点实验室开放基金(编号:ES_SBSM(06)_07)
联系地址:西安科技大学测绘学院西安市雁塔路58号。邮编:710054。

